テクノロジー
技術レポート:アーカイブ
Category:航空システム
原子炉建屋内調査用マルチロータヘリコプタ向け管制ソフトウェアの開発
大手通販業者の無人配送サービス計画で一躍有名になったマルチロータヘリコプタは、今後、インフラの点検作業やレスキューミッション等、さまざまな分野で幅広く活用されることが期待されている。昨年度、千葉大学が中心となって行っているマルチロータヘリコプタによる原子炉建屋内調査に係る研究開発プロジェクトに参画し、機体の遠隔操縦を行うための管制ソフトウェアを開発した。
本稿では、マルチロータヘリコプタおよびその遠隔操縦システム全体の概要に触れた後、当社が開発した管制ソフトウェアの構成や機能について説明する。
参考情報:
- この技術レポートは、当社が展開する宇宙・通信事業の航空システムソリューションに係る技術について著述されたものです。
- 航空システムソリューションは、つくば事業所/通信機事業所 名古屋事務所(中部事業開発センター)が提供しています。
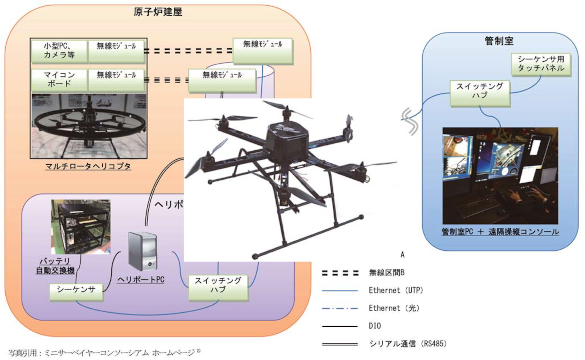
1 MSS技報・Vol.25*つくば事業部 第二技術部 **つくば事業部 第一技術部 原子炉建屋内調査用マルチロータヘリコプタ向け管制ソフトウェアの開発 Development of Ground Control Software of Multi-rotor Helicopter for Reactor Building Investigation 服部 浩明* 喜多島 佳之* 江尻 悠美子** Hiroaki Hattori, Yoshiyuki Kitajima, Yumiko Ejiri 大手通販業者の無人配送サービス計画で一躍有名になったマルチロータヘリコプタは、今後、インフラの点検作業やレスキューミッション等、さまざまな分野で幅広く活用されることが期待されている。昨年度、千葉大学が中心となって行っているマルチロータヘリコプタによる原子炉建屋内調査に係る研究開発プロジェクトに参画し、機体の遠隔操縦を行うための管制ソフトウェアを開発した。 本稿では、マルチロータヘリコプタおよびその遠隔操縦システム全体の概要に触れた後、当社が開発した管制ソフトウェアの構成や機能について説明する。 The multi-rotor helicopter, which became famous for an unmanned delivery service plan of themajor mail-order retailer at a bound, is expected to be going to be used widely in various fields likethe inspection of infrastructure and the rescue mission etc. in the future. Last year, we participatedin the research-and-development project, that Chiba University played a key role, concerning theinvestigation in a reactor building by the multi-rotor helicopter, and developed the ground controlsoftware for performing remote control of the multi-rotor helicopter. In this paper, after mentioning overview of the entire multi-rotor helicopter and its remote controlsystem, we will describe the configuration and functions of the ground control software that wedeveloped. 1.まえがき 大手通販業者の無人配送サービス計画で一躍有名になったマルチロータヘリコプタ(図1)は、今後、インフラの点検作業やレスキューミッション等、さまざまな分野で幅広く活用されることが期待されている。 昨年度、当社は、千葉大学が中心となって行っているマルチロータヘリコプタによる原子炉建屋内調査に係る研究開発プロジェクトに参画し、管制ソフトウェアの開発を行った。本ソフトウェアは、(原子炉建屋と離れた場所にある)管制室における機体の遠隔操縦、および機体に搭載されたカメラや放射線計測機等のデータを監視することを目的としたものである。また、他のマルチロータヘリコプタへの適用性を考慮し、プログラム間のデータのやり取りに、XMLを用いたメッセージプロトコルを採用している等の特徴を持つ。 本研究開発プロジェクトでは、これまで、原子炉建屋内での飛行を想定した4度のモックアップ試験が行われており、今後、実際の原子炉建屋内での最終試験が実施される予定である。 本稿では、本研究開発プロジェクト向けに千葉大学等が開発したマルチロータヘリコプタおよびその遠隔操縦システム全体の概要に触れた後、当社が開発した管制ソフトウェアの構成や特徴的な機能について説明する。 図1 マルチロータヘリコプタの外観例(引用:(株)自律制御システム研究所ホームページ⑴)2 MSS技報・Vol.253. 原子炉建屋調査プロジェクトと遠隔操縦システム 本研究開発プロジェクトは、資源エネルギー庁による「平成25年度発電用原子炉等廃炉・安全技術基盤整備事業」の一つとして行われているものであり、水素爆発後の原子炉建屋のように、高放射線環境下で床面に瓦礫等が散乱した室内空間を対象に、カメラ映像により構造物内の状況を確認する技術や、空間線量データを取得する技術等の実証を行うことが目的である。 このような目的のため、千葉大学が中心となり、新型のマルチロータヘリコプタ、およびその遠隔操縦システムを開発した。システムの全体構成を図2に示す。また、システムの主要な構成品を以下に示す。これら構成品のうち、当社は、管制室PCおよびヘリポートPC上で動作するソフトウェア(管制ソフトウェア)の開発を行った。⑴ マルチロータヘリコプタ 6個のロータを持ったヘリコプタ。管制室PCからの操縦コマンドにより、飛行を行う。主な搭載品は以下の通り。・交換可能なバッテリケース・FPV(First Person View)カメラ、上方向カメラ、2. マルチロータヘリコプタ マルチロータヘリコプタは、その名の通り、複数の(3つ以上の)ローターを持った回転翼機であり、シングルロータヘリコプタ(いわゆる普通のヘリコプタ)と違い、モータの回転制御のみで飛行可能なことが特徴である。一般的には、GPS等を利用して無人で自律飛行するものか、リモートコントロール(遠隔操縦)により飛行するもの(あるいは、その両方を組み合わせたもの)に分類される。 マルチロータヘリコプタの用途は多岐にわたる。ホビー用としては、安価なラジコンヘリが市場に数多く出回っており、産業用としては、空撮(e.g. ソチオリンピックでの屋外競技の空撮)、インフラの点検(e.g. 橋梁、送電線等の目視点検)、科学的観測(e.g. 汚染区域での放射線測定)等に利用されている。今後も、産業分野を中心に、さらなる応用が期待されており、米国ではマルチロータヘリコプタに代表される無人航空機産業が、2025年までに8兆円規模になるという予測(2)もある。 なお、産業用マルチロータヘリコプタの開発は、主にドイツ、カナダ、中国等をはじめとする海外メーカが先行しており、日本は出遅れているのが現状である。図2 マルチロータヘリコプタ遠隔操縦システム 全体構成3 MSS技報・Vol.254. 管制ソフトウェア4.1 目的と構成 管制ソフトウェアは、管制室PCおよびヘリポートPCにインストールされ、互いに連携することにより、運用者がコンソールから入力した操縦コマンドをマルチロータヘリコプタに送信する機能、およびマルチロータヘリコプタの状態(カメラ画像、機体姿勢、速度、バッテリ電圧等)を機体から取得し、遠隔操縦用画面に表示する機能を提供する。管制ソフトウェアの機能ブロック図を、図3に示す。管制室PC‐ヘリポートPC間および管制室PC‐機体間はソケット通信、ヘリポートPC‐機体間はシリアル通信(RS-485)によりデータの送受信を行う。各々の通信周期は、データの量や重要度に応じて1~50Hz程度に設定している。なお、管制室PC‐ヘリポートPC間の通信では、XMLに準拠したメッセージフォーマットを採用している(詳細は4.3項参照)。4.2 遠隔操縦用画面 管制ソフトウェアの主要な遠隔操縦用画面として、FPVカメラ画面(図4)と、上下カメラ画面(図5)がある。 マルチロータヘリコプタの飛行時、運用者は、FPVカメラ画像(図4①)を見ながら、コンソールのジョイスティックおよびコマンドボタンを使って遠隔操縦を行う。ただし、FPVカメラの視野は限られており、さらに、実際の原子炉建屋内は薄暗く、前方の状況も十分に把握できない可能性もある。そのような状況に備え、レーザレンジスキャナ画像(図4②および③)により、機体周辺の壁や障害物の状況を把握することができるようになっている。図4の例では、機体の進行方向に向かっ下方向カメラ・レーザレンジスキャナ、SLAM(SimultaneousLocalization and Mapping)用小型PC・放射線測定器・ダストサンプラ⑵ 管制室PC+遠隔操縦コンソール 運用者が、マルチロータヘリコプタの状態(カメラ画像、機体姿勢、速度、バッテリ電圧等)を画面で確認しながら、遠隔操縦を行うためのPCおよびコンソール。管制室内に設置される。詳細は4章で述べる。⑶ ヘリポートPC 管制室PCから受信した操縦コマンドをマルチロータヘリコプタに送信し、マルチロータヘリコプタから受信したデータを管制室PCに送信するためのPC。原子炉建屋内のヘリポートに設置される。詳細は4章で述べる。⑷ バッテリ自動交換機 マルチロータヘリコプタのバッテリを自動で交換するための装置。マルチロータヘリコプタは、本装置上から離着陸する。最大8個のバッテリを搭載可能であり、収納されているバッテリは充電を行うことにより、再度利用することができる。図3 管制ソフトウェア 機能ブロック図図4 FPVカメラ画面4 MSS技報・Vol.25して、ヘリポートPCは、機体等から取得したデータのうち、送信要求のあったデータを選び出して、「データ設定要求メッセージ」として管制室PCに送信している。データ送信要求を行う際は、XMLの「属性(Attribute)」により、データの送信周期や、数値データのエンコード方式(テキストまたはBase64)等を指定することが可能である(図6の例では、データ送信周期を20ms、数値データのエンコード方式をテキストとしている)。また、データ設定要求の際も、同様にXMLの属性を使うことで、データの型を規定したり、基準となる座標系の情報を付与すること等が可能である(図6の例では、加速度データを要素数3の実数型と規定し、速度データの基準となる座標系を“n”(航法座標系)としている)。 計算機間(プログラム間)のデータ通信に、バイナリデータではなく、このようなXML形式のメッセージを導入するメリットとしては、上記のように、メッセージの内容に柔軟性を持たせることができること、(テキストベースなので)判読が容易なこと、さらには、別のマルチロータヘリコプタの管制システムへの応用・拡張がしやすいこと等が挙げられる。デメリットしては、バイナリデータに比べ、通信量が増えることが挙げられるが、一般的なGigabit Ethernet程度の帯域があれば、問題はないと考える。5. モックアップ試験 2014年4月より、マルチロータヘリコプタの遠隔操縦て左側に壁があり、さらに左前方には障害物(天井クレーンの一部)があることがわかる。 離着陸時や原子炉建屋内のフロアを移動する際は、上方向カメラや下方向カメラの画像(図5①および②)を確認しながら操縦を行う。また、機体がどのフロア(建屋の何階)にいるかは、気圧高度に基づく機体高度表示(図5③)により把握することができる。 その他、安全に飛行を行うための補助機能として、機体の帰還場所(バッテリ自動交換機の上面)のおおよその方向(前/後/左/右/下)を瞬時に把握するための表示(図4④)や、機体の姿勢やバッテリ電圧等を監視し、異常時に警告表示を行う機能等が備わっている。4.3 XMLを用いた通信フォーマット 前述の通り、管制室PC‐ヘリポートPC間の通信では、XMLに準拠したメッセージフォーマットにより、データの受け渡しを行っている。 両PC間でのXMLメッセージのやり取りの例を、図6に示す。この例においては、まず、画面の表示に必要な機体の各種データ(タグ名<UAV>に属するデータ)を取得するため、管制室PCからヘリポートPCに対して「データ送信要求メッセージ」を送っている。これに対図5 上下カメラ画面図6 XMLメッセージの例5 MSS技報・Vol.256. むすび 当社が開発した、原子炉建屋内調査用マルチロータヘリコプタ向け管制ソフトウェアの構成および特徴的な機能について説明した。 本ソフトウェアは、4.3項でも述べた通り、他の目的向け(e.g. 橋やトンネル等のインフラ点検用)のマルチロータヘリコプタへ応用し易い作りとなっており、今後の他プロジェクトへの展開が期待される。 最後に、本開発業務を通して、ご指導頂いた千葉大学の野波健蔵特別教授、岩倉大輔様、Tytus Wojtara様、小手和徳様に、深く感謝致します。参考文献(1)http://www.acsl.co.jp/la.html(2)Association For Unmanned Vehicle SystemsInternational:The Economic Impact of UnmannedAircraft Systems Integration in the United States(2013)(3)http://mini-surveyor.com/執筆者紹介服部 浩明1998年入社。つくば事業部に配属。入社後は、主に国際宇宙ステーション日本実験棟「きぼう」のロボットアームに係るソフトウェア開発・解析業務に従事。他、宇宙ロボットに係る要素技術研究業務や、宇宙機のシミュレータ等に係るソフトウェア開発業務に従事。喜多島 佳之2003年入社。つくば事業部に配属。入社後は、主に国際宇宙ステーション日本実験棟「きぼう」のロボットアームに係るソフトウェア開発・解析・運用業務に従事。他、宇宙機のシミュレータ等に係るソフトウェア開発業務に従事。江尻 悠美子2011年入社。つくば事業部に配属。入社後は、衛星軌道解析ソフトウェア開発・解析業務の他、宇宙ステーション補給機「こうのとり」(HTV)運用準備・運用業務に従事。システムのモックアップ試験が、4回に分けて実施された。モックアップ試験は、原子炉建屋を想定した屋内実験施設にて実施され、高さ約18mのコンクリート壁と、実験施設の壁の間の空間を利用し、バッテリ自動交換機からの離着陸、コンクリート壁に沿った飛行、コンクリート壁上面への侵入・着陸等のテストが行われた。モックアップ試験完了後は、実際の原子炉建屋内での最終試験が実施される予定である。図7は、当社も参加して行われた第1回モックアップ試験(2014年4月実施)における機体の飛行テストの様子である(写真右側はコンクリート壁)。図7 第1回モックアップ試験における飛行テストの様子