テクノロジー
技術レポート:アーカイブ
Category:航空システム
航空機の突風応答軽減制御シミュレーションSW開発
本稿では、独立行政法人宇宙航空研究開発機構が進める、ドップラーライダーを用いた突風応答軽減制御技術の検討のために開発した、航空機のシミュレーションソフトウェアFDSGAを紹介する。FDSGAは、風計測ライダーモデル、及びそれが提供する未来の突風データを用いる予見制御則モデルを含み、航空機の剛体としての6自由度運動を模擬する。FDSGAは、MATLAB/Simulinkを使用したモデルベース設計によって開発された。
参考情報:
- この技術レポートは、当社が展開する宇宙・通信事業の航空システムソリューションに係る技術について著述されたものです。
- 航空システムソリューションは、つくば事業所/通信機事業所 名古屋事務所(中部事業開発センター)が提供しています。
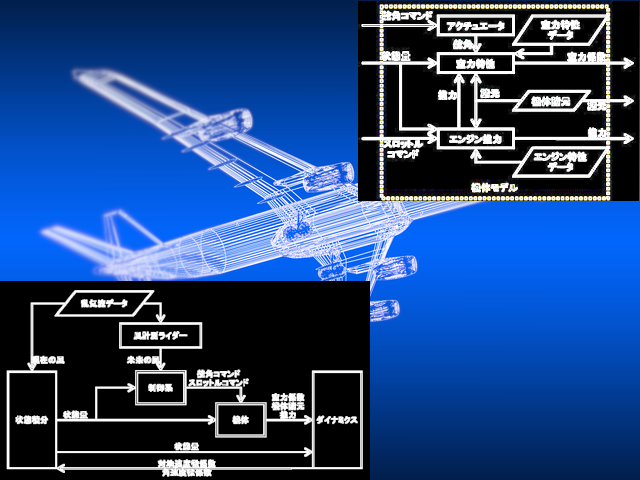
1 MSS技報・Vol.25*中部事業所 第二技術部 **つくば事業部 第一技術部 航空機の突風応答軽減制御シミュレーションSW開発 Development of Airplane Simulation Software for Gust Alleviation Control System 中山 空星* 松田 里香** Takatoshi Nakayama, Rika Matsuda 本稿では、独立行政法人宇宙航空研究開発機構が進める、ドップラーライダーを用いた突風応答軽減制御技術の検討のために開発した、航空機のシミュレーションソフトウェアFDSGAを紹介する。FDSGAは、風計測ライダーモデル、及びそれが提供する未来の突風データを用いる予見制御則モデルを含み、航空機の剛体としての6自由度運動を模擬する。FDSGAは、MATLAB/Simulinkを使用したモデルベース設計によって開発された。 In this paper, we will introduce airplane simulation software FDSGA developed for the study ofGust Alleviation(GA)control technology of the Japan Aerospace Exploration Agency(JAXA).FDSGA includes a wind measurement LIDAR model, and a preview controller model which utilizesfuture gust data provided from the LIDAR model, and simulates 6-degree-of-freedom motion of anairplane as a rigid body. FDSGA has been developed by Model-Based Design with MATLAB/Simulink. 1.まえがき 航空機が乱気流中を飛行する際、急激な加速度変化がおきて乗員や乗客が負傷する事故となることがある。独立行政法人宇宙航空研究開発機構(以降、JAXAと記す)では、このような航空機の乱気流事故を防止する技術について、研究開発が進められている。その一環として、突風応答軽減(以降、GAと記す)制御技術が検討されている(7)。この検討では、ドップラーライダーによって取得される航空機前方の乱気流速度を、航空機の急激な加速度変化の抑制に活用しようとしている。 当社は、ソフトウェアによるシミュレーション解析においてJAXAのGA制御技術の検討に協力しており(8)、その目的に供するための航空機シミュレーションソフトウェアFDSGA(Flight Dynamics Simulator for GAcontrol system)を開発した。本成果は、当社が受注した平成25年度JAXA調達「ライダー利用型突風応答軽減システムの故障シミュレーションソフトウエアの製作」によるものである。本件は、国土交通省からの受託研究として実施された。 FDSGAは、航空機の巡航(高度一定対称トリム飛行)シミュレーションを対象としている。また、FDSGAにおけるGA制御系は、機体の垂直方向加速度の抑制を対象としている。2.シミュレーションソフトウェアの構成2.1 概要 FDSGAは、航空機の剛体としての6自由度の並進・回転運動を模擬する。また、FDSGAには、風計測ライダーモデル及び予見制御則モデルが含まれる。 風計測ライダーモデルは、JAXAが開発を進めているドップラーライダー(7)を表現するモデルである。2.3節に述べるとおり、風計測ライダーモデルが提供する情報は距離的に前方の風速ベクトルである。 予見制御則モデルは、事前に分かっている未来の乱気流速度を利用して機体の揺れを抑制する制御則(6)のモデルである。2.4節に述べるとおり、予見制御則モデルは風計測ライダーモデルが提供する情報を利用する。 FDSGAを用いることで、これらのモデルによって制御される、乱気流中を飛行する航空機の非線形な運動を数値的に解析することができる。 FDSGAは、シミュレーション機能以外にもトリム計算機能やモデル線形化機能等も備える。しかし、機能の説明が本旨ではないため、本稿では省略する。2.2 シミュレーションモデル シミュレーションモデルは連続系で構築され、常微分方程式の近似解を求める積分ソルバには、固定ステップ2 MSS技報・Vol.25基準軸から、機体Z軸方向に偏角±λを持つ2方向にレーザ光を照射し、各照射軸方向の距離Lpの計測点における、照射軸方向に対する気流の速さV1,V2を計測することができる。計測された速さから基準軸上の風速ベクトルWを導出することで、機体前方の乱気流速度を得ることができる。 乱気流データは、慣性X軸方向の距離に対する風速のテーブルデータとして定義しており、風速は慣性Z軸方向には一様と仮定している。シミュレーションで使用するデータは慣性Z軸方向の風速のみとしており、JAXAより提供を受けた、実際の運行から得られたデータを使用している。また、FDSGAの機能の一つとして、ドライデン型の確率的連続突風モデルによる乱気流データをオフラインで生成できる。2.4 制御系モデル 制御系モデルは、図3に示すとおり、GA制御系、横方向制御系及びオートスロットルから構成されるモデルである。 GA制御系ブロックは予見制御則モデルであり、未来の乱気流速度を用いるフィードフォワード項、及び現在の状態量を用いるフィードバック項から構成され、機体で4次のRunge-Kutta法を標準として指定した。積分刻み幅は、シミュレーションごとに任意に指定できる。シミュレーションモデルの機能ブロック図を図1に示す。状態積分ブロックは、現在の状態量(位置、姿勢角、対地速度、角速度)及び対地速度微係数、角速度微係数より次の積分ステップにおける状態量を計算し、状態量及び乱気流データから迎角、対気速度等を計算する。また、米国標準大気(4)を基にした大気モデルを含み、動圧やマッハ数も計算する。 風計測ライダーブロックは、2.3節に示すドップラーライダーを表現するモデルであり、乱気流データから未来の乱気流速度を読み出し、制御系ブロックに提供する。 制御系ブロックは、2.4節に示す予見制御則モデルを含む機体運動制御のためのブロックであり、各種飛行パラメータ及び未来の乱気流速度を用いて、舵角コマンドを計算する。また、オートスロットルモデルにおいてスロットルコマンドを計算する。 機体ブロックは、2.5節に示すとおり、航空機固有の情報が含まれた機体モデルであり、モデルを切り替えて参照できる。各種飛行パラメータ及び制御系ブロックの出力するコマンドを用いて、空力係数や推力等を算出する。また、機体諸元データもダイナミクスブロックに提供する。 ダイナミクスブロックは、現在の状態量及び機体ブロックの出力から、剛体の並進・回転運動の方程式を利用して対地速度微係数、角速度微係数を算出する。2.3 風計測ライダーモデル 風計測ライダーモデルは、図2に示すドップラーライダーを表現するモデルである。本モデルが示すドップラーライダーは、機体X軸からZ軸方向にηのずれを持つ図1 シミュレーションモデルの機能ブロック図図2 風計測ライダーの概略図3 MSS技報・Vol.25飛行パラメータ及びスロットルコマンドを用いて、推力及び推力モーメントを計算する。 FDSGAでは、次の3機の機体モデルを用意している。機体モデルは、新しい機能を必要としない限り、FDSGAに改修を加えることなく追加可能な設計になっている。⑴ Boeing 747 大型ジェット旅客機。公開データ(1)(2)(3)を基に機体諸元、空力特性モデル、エンジンモデルを作成した。アクチュエータモデルには、推定に基づいたパラメータを設定している。⑵ Convair 880M 中型ジェット旅客機。公開データ(3)を基に機体諸元、空力特性モデルを作成した。エンジンモデルは、Boeing747のエンジンモデルをスケールさせて作成した。アクチュエータモデルには、推定に基づいたパラメータを設定している。⑶ MuPAL-α JAXAが所有する小型ターボプロップ実験機。JAXAより提供されたデータ(6)(4)を基に機体諸元、空力特性モデル、エンジンモデル、アクチュエータモデルを作成した。3. 開発環境と設計手法3.1 MATLAB/Simulinkによるモデルベース設計 MATLAB/SimulinkはMathworks社によって提供される数値計算プログラミング環境及びモデリング・シミュレーション環境である(6)(10)。SimulinkはMATLAB環境上で動作し、ユーザがグラフィカルな操作で構築したブロック線図モデルをシミュレーション実行させることが可能である。の垂直方向加速度を緩和するように舵角コマンドを出力する。ここで未来の乱気流速度とは、風計測ライダーモデルが出力する、機体前方の機体Z軸方向の風速を指す。数秒のオーダで通過する、比較的近くの乱気流は短時間に大きく挙動を変えないと仮定することで、距離的に前方の乱気流速度を時間的に未来の乱気流速度として利用する(8)。 横方向制御系ブロックは、2.5節(3)MuPAL-α用であり、他の機体では使用しない。ロール角及び対地速度方向を一定に保つように、エルロンコマンド及びラダーコマンドを出力する。 オートスロットルブロックは、対気速度の大きさ及び高度変化率からスロットルコマンドを計算するモデルである。Boeing 747の資料(1)に基づいて、設計されている。2.5 機体モデル 機体モデルは、機体諸元や空力特性、エンジン特性等の機体固有の情報を含み、シミュレーションにおける機体特性を表現するモデルである。その基本的な構成を図4に示す。 アクチュエータブロックは、舵角コマンドから舵角を計算する。1次遅れ系及び2次遅れ系の2つのモデルを実装し、切り替えることができる。なお、2次遅れ系モデルには、バックラッシュ、舵角及び舵角レートの制限、むだ時間を設定できる。 空力特性ブロックは、空力特性データから、飛行パラメータや舵角等を用いて空力係数を求める。 機体諸元データには、機体質量、主翼幅、空力平均翼弦長、慣性能率、慣性乗積等のデータが含まれる。 エンジン推力ブロックは、エンジン特性データから、図3 制御系モデルの機能ブロック図図4 機体モデルの機能ブロック図4 MSS技報・Vol.25 このように、モデル作成からシミュレーション実施、結果の確認、モデルの修正までの一連の作業がシームレスに実施できたため、早期かつ効率的に実装不備を解消できた。⑵ 制御系モデルの組み込み 航空機の静的な安定性による巡航を確認したので、続いて制御系モデルを組み込んだ。予見制御則モデルの検証では、風計測ライダーモデルとして機体前方の風速ベクトルの真値が取れるよう簡易に仮実装したものを使用し、予見制御則を提案した論文(6)と同等のシミュレーション条件を設定して、論文と同等の結果を出力できるかを確認した。⑶ 風計測ライダーモデルの組み込み 風計測ライダーモデルについては、シミュレーションモデルとは独立して作成及び検証を行った。検証にあたっては、慣性X軸方向の距離及び2.3節に示す風計測ライダーモデルのパラメータη,λ,L pを任意に設定し、気流の速さV1,V2を経由して算出された風速ベクトルWが、慣性X軸方向の同じ距離における風速ベクトルの真値と十分一致するかを確認した。⑷ 機体モデルの追加・制御パラメータの調整 ここまでで一通りのシミュレーション機能を実装した。ところで2.5節のとおり、FDSGAでは複数の機体モデルを用意している。シミュレーションモデルの基本的な部分は共通化できるため、機体モデル及び制御パラメータを切り替えられるよう実装し、検証済みのシミュレーションモデルを再利用した。 このように、Simulinkのモデル参照機能を利用することで、モデルの再利用やシミュレーションのフレームワーク化も容易に実現できる。4. シミュレーションの実施4.1 大型ジェット機のシミュレーション FDSGAを使用したシミュレーションの例として、予見制御を行う場合の航空機の飛行シミュレーションを示す。 高度3万フィートをマッハ0.8で巡航するBoeing 747が、図5に示す乱気流の中を飛行するシミュレーションを実施する。アクチュエータモデルには、0.5°のバックラッシュ及び0.2秒のむだ時間を持つ2次遅れ系モデルを使用する。予見制御則モデルでは、縦の制御舵面としてエレベータ及びエルロン(左右同相操舵)を使用し、予見時間を3.3秒とする。予見時間については、Boeing 747のモデルについて文献(6)に則った方法で決定した。 モデルベース設計は制御設計手法のひとつで、制御対象をモデル化してシミュレーションすることで制御系の反復的な解析を可能とするものである。Simulinkを始めとするグラフィカルなシミュレーション環境が整ってきたことで、モデルベース設計には複雑な制御システムの解析が迅速に行えるメリットがあり、自動車や航空の分野で積極的に採用されている。3.2 モデルベース設計によるシミュレーションSW開発 FDSGAは、すべてMATLAB/Simulinkを用いて開発された。モデル部分はSimulinkによるブロック線図で作成され、条件やケースを設定したシミュレーションをMATLABのインターフェースで実行できるようになっている。開発においては、Simulinkによるモデル作成が主要な作業であり、次の流れでモデル作成を進めた。⑴ シミュレーションモデルの作成 最初に、風計測ライダーブロック及び制御則ブロックを除く、2.2節に示す基本的なシミュレーションモデルを構築した。シミュレーションモデル自体の実装を検証するため、機体モデルについては、最初は縦方向(揚力方向、抗力方向、ピッチ方向)の空力特性モデルのみ実装した。 最小限の構成で滑空の飛行シミュレーションを実施し、信号線のプロットを見て挙動を確認する。不審な挙動を確認したら原因を追求し、修正して再度シミュレーションを実施して確認する。このように、妥当な結果が得られるまでシミュレーションと修正を繰り返してデバッグを行った。 滑空シミュレーションにおいて妥当な結果が得られたところで、次にエンジンモデルを組み込み、推力を追加した巡航シミュレーションにおいて反復的なデバッグを実施した。最後に横方向(横力方向、ロール方向、ヨー方向)の空力特性モデルを追加して、同様にデバッグを実施した。図5 使用する乱気流データ5 MSS技報・Vol.255.4 謝辞 FDSGAを開発するにあたってご協力頂いたJAXA航空本部、及び社内の関係各位に御礼申し上げる。参考文献(1)C. R. Hanke and D. R. Nordwall:The simulationof a jumbo jet transport aircraft. Volume 2:Modeling data, Technical Report, NASACR-114494, 1970.(2)C. R. Hanke:The simulation of a large jet transportaircraft. Volume 1, Mathematical model,Technical Report, NASA CR-1756, 1971.(3)R. K. Heffley and W. F. Jewell :Aircraft handlingqualities data, Technical Report, NASA CR-2144,1972.(4)U.S. Government Printing Office: U.S. StandardAtmosphere, 1976.(5)穂積弘毅,白井正孝:低速風洞試験によるMuPAL(多目的実証実験機)のDLC フラップ基本空力特性確認,航空宇宙技術研究所資料,NALTM-756,2001.(6)林千瑛,張替正敏:最適予見制御による乱気流中の航空機の揺れの制御,日本航空宇宙学会論文集,Vol. 58,No. 667,pp. 164-170, 2010.(7)井之口浜木,古田匡,濱田吉郎,町田茂:機上の乱気流事故防止システムに対する信頼性評価の研究開発,第52回飛行機シンポジウム予稿集,(8)濱田吉郎,佐藤昌之,齊藤健一,中山空星:ドップラーライダーを用いた突風応答軽減制御系のシミュレーションソフトウェア,第52回飛行機シンポジウム予稿集,2C07,2014.4.2 シミュレーション結果 4.1節のシミュレーションを実施した結果について、機体の垂直方向加速度の時間に対するプロットを図6に示す。予見制御の効果を確認するため、無制御時のシミュレーション結果との比較として示している。無制御時では下向きに最大で1Gを超えていた加速度が、予見制御下では0.5G未満まで緩和されていることがわかる。5. むすび5.1 まとめ ここまで、GA制御技術検討のための航空機のシミュレーションソフトウェアFDSGAを紹介し、その開発について述べた。 開発にあたっては、MATLAB/Simulinkを使用したモデルベース設計を実践し、シミュレーション実行及び結果解析による反復的なデバッグ、及びモデルの切り替えによるロジックの再利用の恩恵を受けた。 FDSGAを用いたシミュレーションにおいては、予見制御則による大型ジェット旅客機の乱気流影響に対するロバスト性を確認することができた。5.2 課題 課題としては、シミュレーション実行時間の短縮が考えられる。FDSGAの用途として、計測誤差に対するロバスト性検証のための、モンテカルロ法による連続シミュレーション実行がある。十分な数の誤差ケースに対してシミュレーションが反復実行されるため、シミュレーション実行時間の短縮効果は大きい。今後、シミュレーション速度を意識した開発が重要となる可能性は高い。5.3 今後の展開 当社は、FDSGA改修となる、平成26年度JAXA調達「ライダー利用型突風応答軽減システムの故障シミュレーションソフトウエアに使用する機体モデル製作」を受注した。これを受け、FDSGAに対して、離着陸における昇降率一定対称トリム飛行に対応させる改修を行い、さらに小型ジェット旅客機の機体モデルを追加する予定である。 また、FDSGAの開発によって、モデルベース設計のノウハウ及び航空機制御シミュレーション技術の蓄積を得た。この実績に対して、航空機搭載用ソフトウェア開発や飛行制御則設計などへ応用されることを期待するとともに、当社の航空分野への技術的貢献を果たしたい。図6 シミュレーション結果(青:無制御 赤:予見制御下)2C05,2014.6 MSS技報・Vol.25執筆者紹介中山 空星2012年入社。つくば事業部でSI事業を経て、2013年より中部事業所(旧 中部分室)に所属。現在は主に航空機の解析シミュレーションソフトウェア開発に従事。松田 里香1987年入社。H2Aロケット飛行解析業務、GX搭載ソフトウェア開発、サブオービタル機や空中発射ロケットの誘導研究などに携わる。2012年より航空機の解析シミュレーション業務に従事。(9)The Mathworks, Inc.: MATLAB ‒ 数値計算言語,http://www.mathworks.co.jp/products/matlab/(10)The Mathworks, Inc.: Simulink ‒ シミュレーション及びモデルベース デザイン(MBD),http://www.mathworks.co.jp/products/simulink/