テクノロジー
技術レポート:アーカイブ
Category:カーエレクトロニクス
後退時衝突被害軽減ブレーキ対応ソナーソフトウェア開発
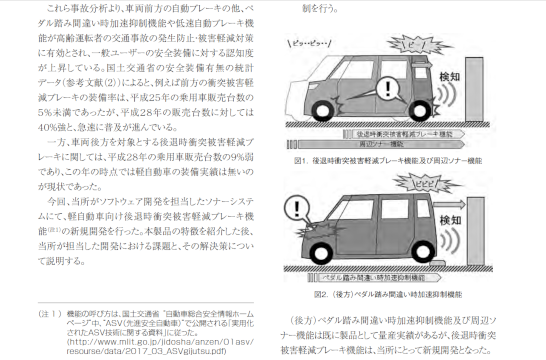
日々、様々な自動車事故のニュースが流れているが、近年、ペダル踏み間違い、シフト操作ミスなどを原因とする事故のニュースを見かけることが増えた。これは高齢者ドライバーが増加したことが原因の一つと言われている。平成29年版交通安全白書(参考文献(1))によると、平成20年以降の10年間で75歳以上の運転免許保有者は約1.8倍になる。また、平成28年度死亡事故の人的要因分析では、ハンドル操作不適、ブレーキ・アクセル踏み間違いを要因とする事故の割合が、75歳未満では11.7%に対し、75歳以上では20.9%になっている。これら事故分析より、車両前方の自動ブレーキの他、ペダル踏み間違い時加速抑制機能や低速自動ブレーキ機能が高齢運転者の交通事故の発生防止・被害軽減対策に有効とされ、一般ユーザーの安全装備に対する認知度が上昇している。国土交通省の安全装備有無の統計データ(参考文献(2))によると、例えば前方の衝突被害軽減ブレーキの装備率は、平成25年の乗用車販売台数の5%未満であったが、平成28年の販売台数に対しては40%強と、急速に普及が進んでいる。一方、車両後方を対象とする後退時衝突被害軽減ブレーキに関しては、平成28年の乗用車販売台数の9%弱であり、この年の時点では軽自動車の装備実績は無いのが現状であった。今回、当所がソフトウェア開発を担当したソナーシステムにて、軽自動車向け後退時衝突被害軽減ブレーキ機能(注1)の新規開発を行った。本製品の特徴を紹介した後、当所が担当した開発における課題と、その解決策について説明する。
参考情報:
後退時衝突被害軽減ブレーキ対応ソナーソフトウェア開発 三田事業所 技術第2部 技術第2課三善 健太郎、 白澤 善、 松井 崇浩(注1 ) 機能の呼び方は、国土交通省 “自動車総合安全情報ホームページ”中、“ASV(先進安全自動車)”で公開される「実用化されたASV技術に関する資料」に従った。(http://www.mlit.go.jp/jidosha/anzen/01asv/resourse/data/2017_03_ASVgijutsu.pdf) 後退時衝突被害軽減ブレーキ対応 ソナーソフトウェア開発 一般論文 1.まえがき 日々、様々な自動車事故のニュースが流れているが、近年、ペダル踏み間違い、シフト操作ミスなどを原因とする事故のニュースを見かけることが増えた。これは高齢者ドライバーが増加したことが原因の一つと言われている。平成29年版交通安全白書(参考文献(1))によると、平成20年以降の10年間で75歳以上の運転免許保有者は約1.8倍になる。また、平成28年度死亡事故の人的要因分析では、ハンドル操作不適、ブレーキ・アクセル踏み間違いを要因とする事故の割合が、75歳未満では11.7%に対し、75歳以上では20.9%になっている。これら事故分析より、車両前方の自動ブレーキの他、ペダル踏み間違い時加速抑制機能や低速自動ブレーキ機能が高齢運転者の交通事故の発生防止・被害軽減対策に有効とされ、一般ユーザーの安全装備に対する認知度が上昇している。国土交通省の安全装備有無の統計データ(参考文献(2))によると、例えば前方の衝突被害軽減ブレーキの装備率は、平成25年の乗用車販売台数の5%未満であったが、平成28年の販売台数に対しては40%強と、急速に普及が進んでいる。一方、車両後方を対象とする後退時衝突被害軽減ブレーキに関しては、平成28年の乗用車販売台数の9%弱であり、この年の時点では軽自動車の装備実績は無いのが現状であった。今回、当所がソフトウェア開発を担当したソナーシステムにて、軽自動車向け後退時衝突被害軽減ブレーキ機能(注1)の新規開発を行った。本製品の特徴を紹介した後、当所が担当した開発における課題と、その解決策について説明する。 2.製品概要 本製品の主な機能は、大きく以下3機能(注1)となる。図1、2に各動作イメージを示す。① 周辺ソナー機能 検知した障害物までの距離に応じて警告を行う。② 後退時衝突被害軽減ブレーキ機能 検知した障害物の距離と車速を元に、衝突すると判断した時、ブレーキを作動させる。③( 後方)ペダル踏み間違い時加速抑制機能 障害物がある状態で、ドライバーがアクセルペダルを強く踏み込む状態を検知した時、エンジン出力の抑制を行う。図1.後退時衝突被害軽減ブレーキ機能及び周辺ソナー機能図2.(後方)ペダル踏み間違い時加速抑制機能(後方)ペダル踏み間違い時加速抑制機能及び周辺ソナー機能は既に製品として量産実績があるが、後退時衝突被害軽減ブレーキ機能は、当所にとって新規開発となった。65後退時衝突被害軽減ブレーキ対応 ソナーソフトウェア開発図3.ソナーシステム構成図3.ソナーシステムについて3.1 システム構成今回開発を行った製品は、ソナーすなわち超音波センサーを用いて後退時衝突被害軽減ブレーキ機能を実現していることが特徴となる。ソナーシステムの構成を図3に示す。本システムは、車両後部に装着された超音波センサーを4個、エンジン、ブレーキ、トランスミッション、パワーステアリングの各コントロールユニット、メーターユニット及びブザーで構成される。各超音波センサーから超音波を送信し、車両、壁などからの反射波を受信し、送信から反射波受信までの時間を元に、障害物の距離、位置を算出する。後退時衝突被害軽減ブレーキ機能は、車速、ステアリング角の情報を取得し、障害物の位置情報と総合して衝突するかを判断し、衝突が回避できないと判断したタイミングで、ブレーキ要求を送信する。3.2 超音波センサーの特徴前方を対象とする衝突被害軽減ブレーキでは、多くの場合、レーザーレーダー、カメラ、ミリ波レーダーなどのセンサーが採用されている。ここでは、これらセンサーと比較した時、超音波センサーの特徴について述べる。図4.各センサーの検知範囲(1) 検知対象図4に、各センサーの検知範囲イメージを示す。前方で使われる各センサーは、数十mまでの検知が可能だが、超音波センサーでは数mまでの検知に限定される。前方の場合、車速 数10~100km/h程度まで障害物の検知及びブレーキ制御を行う必要がある。一方、後退時衝突被害軽減ブレーキでは、低速域(今回の場合~10km/h程度) のみを対象とするシステムである。また、レーザーレーダー、カメラの場合、ガラスなどの透明な対象物の検知は難しいが、超音波センサーは透明な物体も検知が可能である点も特徴となる。(2) コスト前方で使われるセンサーは一般に高価である。これに対して、超音波センサーは安価なことがメリットである。(3) 法規への対応レーザーレーダー、ミリ波レーダーでは各国で異なる法規への対応が制約となる。これに対してカメラ、超音波センサーは、制約となる法規制がなく、海外展開が容易な点がメリットとなる。(4) 環境条件いずれのセンサーでも検知に用いる光、電波は自然界に存在し、環境次第ではノイズとなり検知性能の低下や誤検知の要因となる。超音波センサーについて、超音波を発するノイズ源は多く存在し、周囲の状況によって検知性能の低下が発生する。また、超音波センサーは外気温や風などの天候要因で検知性能が影響を受けやすいこともデメリットとなる。以上、メリット、デメリット共に存在するが、これら特性を踏まえ、超音波センサーを用いることとなった。3.3 超音波センサー制御方式の変更今回の開発では、超音波センサーの制御方式の変更も大きな開発要素となった。従来の方式を「アナログセンサー」、新方式を「デジタルセンサー」と呼んでいるが、その違いについて図5を元に説明する。(1) アナログセンサー方式アナログセンサー方式は、従来の周辺ソナー機能のみのシステムから用いてきたセンサー方式であり、超音波周波数のセンサー駆動パルスを送ることでソナーコントロールユニットが直接超音波素子の駆動制御を行う。また、受信信号は数mのハーネスを通じたアナログ信号としてセンサーからソナーコントロールユニットへ伝えられる。ソナーコントロールユニット内のマイクロコンピュータ(以下マイコン)はアナログ信号電圧をモニターすることで障害物の有無・距離を判定する。(2) デジタルセンサー方式新方式のデジタルセンサー方式では、超音波センサーに内蔵した専用ICが、超音波素子の駆動制御、受信信号をモニタリングし、コントロールユニットへは、障害物の有無・距離などの検知結果をシリアル通信で送信する。アナログ信号はセンサー内でデジタル化され、デジタル信号で送信するため、アナログ方式と比較して、S/N比が改善する。そのため受信信号レベルの低い遠距離の検知性能の向上が期待でき、数mまでの安定した障害物検知が必須となる、衝突被害軽減ブレーキ機能の実現に適している。4.開発の課題、解決策ソナーシステムの開発では、当所はソナーコントロールユニット内に組み込むソフトウェアの設計、実装、試験を担当した。また、後述する様に、今回の開発では、衝突被害軽減ブレーキ作動判定、センシングに関するアルゴリズム開発、評価を担当した。今回開発を担当した部分において、以下の様な課題が存在した。① デジタルセンサー方式への対応② 機能開発・評価用プロトタイプの構築③ ブレーキ作動判定の性能改善以下、それぞれの課題とその解決策について述べる。4.1 デジタルセンサー方式への対応前述の様に、今回の開発では、超音波センサー制御方図5.アナログセンサー・デジタルセンサーの構成概略66後退時衝突被害軽減ブレーキ対応 ソナーソフトウェア開発式を変更し、デジタルセンサー方式に対応したセンサー制御ソフトウェアモジュールを新規作成した。従来のアナログセンサー方式では、アナログ信号のサンプリング、デジタル変換した多量のデータに対して、ソフトウェアで信号処理、受信有無を判定していた。そのため、アナログセンサー方式の最新機種の受信区間では、この処理だけでピーク時には65%以上の処理負荷となっていた。一方、デジタルセンサー方式では、信号処理、受信判定部分のソフトウェアが全て不要となり、センサーからシリアル通信を受信したタイミングで検知状態を格納するのみであるため、大幅な処理負荷減が可能となった。代わりに、センサーとのシリアル通信仕様に対応する必要があったが、マイコンのDMA(Direct Memory Access)機能(注2)、割り込み機能(注3)を組み合わせて、ソフトウェアの処理負荷は約5%以内に抑えることができた。ソフトウェアの処理負荷削減もデジタル方式のメリットの一つであり、これによって今回の後退時衝突被害軽減ブレーキ機能の追加や、後述の性能改善を行うための処理時間が確保できた。また、デジタルセンサー方式では信号処理、受信判定をセンサー内の専用ICで行うため、センサー専用ICに対してパラメータをシリアル通信でコマンドとして指示する必要があるが、このパラメータを適切な値に設定することが重要となる。例えば、超音波受信感度、伝搬特性には温度依存があり、外気温をもとに調整するが、温度特性の補正を変動要素毎に分離することで、より実際に近いパラメータ補正量を算出できる様に演算アルゴリズムを新規設計した。4.2 機能開発・評価用プロトタイプの構築これまでの製品開発において、当所は三菱電機㈱で開発した制御アルゴリズムをもとに、コントロールユニットへ組み込むソフトウェアの設計、実装を行う分担であったが、衝突被害軽減ブレーキ作動判定、及びセンシングに関するアルゴリズム開発、評価も担当した。アルゴリズム開発では、ブレーキ作動判定ロジックの設計、閾値を含む制御パラメータのチューニングを行う。また、アルゴリズムの評価は、実車に本システムのプロトタイプを構築して行った。開発開始時には、まずPC上でブレーキ判定ロジックの模擬をするプロトタイプの構築を行った。図6に本プロトタイプの構成を示す。本プロトタイプでは、PC上のCAN(Controller AreaNetwork)(注4)通信評価ソフトに組み込まれるC言語ライクなスクリプト言語を用いており、CAN通信メッセージの送受信制御や基本的な演算をプログラムすることができる。本スクリプトでは、車両内の各コントロールユニットから送信されるCANメッセージの受信、信号の取得、ブレーキ判定アルゴリズム、判定結果のCANメッセージ出力までを制御するプログラミングを行った。本プロトタイプを用いることでコントロールユニット上へブレーキ判定アルゴリズムを搭載せず、PC上に、スクリプトを用いて実装したアルゴリズムにより実車評価が可能となる。これにより、開発の初期段階におけるブレーキ判定の制御用アルゴリズム及び制御用パラメータの課題抽出や目処付けに有用であった。PC上で動作するため、アルゴリズムの動作内容を画面に表示したり、ファイルに出力したりすることもでき、実装したロジックの確認も容易に行うことを可能とした。実際に開発の初期段階の社内評価において本来ブレーキを不作動としたノイズや走行軌跡の外側にある障害物に対してブレーキが作動する問題が発生した際も、原因の解析、対策の検討、アルゴリズムの実装、実車による評価を早期に実現でき、短期間で課題を解決することができた。また、本プロトタイプは、制御用パラメータをPC上のファイルに記録していることから、パラメータの変更が容易であり、社外、社内向けのデモにおいてブレーキ要求のパラメータを変更し動作の違いを体感したい場合などに有用であった。このプロトタイプを用いてまず機能開発を行い、その結果を、製品1stサンプルのソフトウェアへ組み込むという流れで効率的に開発を行うことができた。(注 2 ) ソフトウェアを介さずにマイコン内蔵の専用回路によりメ 図6.機能開発・評価用プロトタイプの構成モリ間のデータ転送を行う機能。(注3 ) ハードウェアによる状態変化検出により、実行中の処理を一時中断して別の処理を実行した後、元に戻る仕組み。(注4 ) 自動車などで各装置を接続するためのネットワーク規格。67後退時衝突被害軽減ブレーキ対応 ソナーソフトウェア開発4.3 ブレーキ作動判定の性能改善後退時衝突被害軽減ブレーキ機能の開発では、以下の要件を満たす必要がある。① 衝突可能性のある障害物を検知し、適切なタイミングでブレーキを作動させること② 衝突可能性の無い障害物、駐車場の車止めに対してブレーキを作動させないことこれらはセンサー感度調整をするにあたって相反する内容となっている。センサーの感度を敏感にすれば、障害物の検知は安定するが、路面の荒れなど障害物の誤検知もしやすく、ブレーキ誤作動のリスクが高くなる。一方、障害物が誤検知されないようにセンサー感度を鈍感にすれば、車両後方正面にある障害物でも近づくまで検知できない、形や向きによって検知できない可能性が高くなり、ブレーキ作動が遅れる、もしくはブレーキ作動できないリスクが高くなる。そこで今回の開発では、誤検知が起きない様にセンサー感度の調整をした上で、時系列の障害物位置情報の特徴を元にブレーキ作動の対象とするか否かを識別する判定仕様を制御アルゴリズム 及び ソフトウェアに追加した。また、この判定仕様では、障害物の形によって検知が安定しない場合を想定して、一時的な検知の変動により障害物位置が算出できない場合も、ブレーキ作動判定が継続できる仕様とした。これらの改善策によって、上記①②を両立した性能改善を達成できた。5.むすび今後も安全装備の普及が進むことは間違いなく、低価格、普及価格帯の乗用車、商用車などへの装備拡大のためにソナーシステムは有効であると言える。また、今回開発した機能に限らず、適用車種、機能拡大のために、さらなる検知性能の向上が課題となる。最後に、今回の後退時衝突被害軽減ブレーキ対応ソナーシステムの開発に際し、共同開発を行った三菱電機㈱はじめ社内外の関係各位に深く感謝申し上げる。参考文献(1) http://www8.cao.go.jp/koutu/taisaku/h29kou_haku/gaiyo/features/feature01.html 内閣府 2017.6(2) http://www.mlit.go.jp/jidosha/anzen/01asv/resourse/data/H28souchakudaisuu.pdf 国土交通省執筆者紹介三善 健太郎 ミヨシ ケンタロウ1997年入社。主に車載ソナーシステムのソフトウェア開発に従事。現在、三田事業所技術第2部技術第2課。白澤 善 シラサワ ゼン2014年入社。主に車載ソナーシステムのソフトウェア開発に従事。現在、三田事業所技術第2部技術第2課。松井 崇浩 マツイ タカヒロ2011年入社。主に車載ソナーシステムのソフトウェア開発に従事。現在、三田事業所技術第2部技術第2課。68後退時衝突被害軽減ブレーキ対応 ソナーソフトウェア開発