テクノロジー
技術レポート:アーカイブ
Category:ロケット・宇宙機・人工衛星開発
マイクロ波放射計データ処理手法の開発
衛星搭載マイクロ波放射計は、大気や地表面のマイクロ波を観測することで海面温度、水蒸気量などを計測する。当社では、マイクロ波放射計処理システムの開発・維持を担当しており、実利用に際し、観測位置情報の格納方式の簡略化や雑音の除去等の手法開発が必要となった。本稿では、マイクロ波放射計処理システムに適用した手法について説明する。
参考情報:
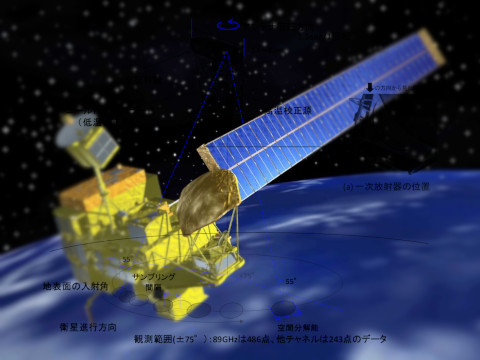
1 MSS技報・Vol.28*鎌倉事業部 第二技術部 **鎌倉事業部 宇宙第二技術部 マイクロ波放射計データ処理手法の開発 The development on the technique to process the data of microwave radiometer 谷口 悠司* 山梨 正人** Yuji Taniguchi, Masato Yamanashi 衛星搭載マイクロ波放射計は、大気や地表面のマイクロ波を観測することで海面温度、水蒸気量などを計測する。当社では、マイクロ波放射計処理システムの開発・維持を担当しており、実利用に際し、観測位置情報の格納方式の簡略化や雑音の除去等の手法開発が必要となった。本稿では、マイクロ波放射計処理システムに適用した手法について説明する。 Onboard microwave radiometer measures sea surface temperature on earth’s surface, watervapor in atmosphere by observing microwave. We have been working on developing andmaintaining the ground station to process the microwave radiometer data. During the development,the processing system was necessary to simplify the processing method to calculate observationlocation to keep the processing time. And after launch, it was found that microwave data wascontaminated with noise, we had to remove them. In this report, we report on our labored pointthrough this development. 1.まえがき 当社では、下記3台のマイクロ波放射計のデータ処理システムの開発を担当した。⑴ 環境観測技術衛星(ADEOS-Ⅱ)搭載 高性能マイクロ波放射計(Advanced Microwave ScanningRadiometer:AMSR)⑵ 地球観測衛星(Aqua)搭載 改良型高性能マイクロ波放射計(Advanced Microwave Scanning Radiometerfor EOS:AMSR-E)⑶ 水循環変動観測衛星(GCOM-W、しずく)搭載高性能マイクロ波放射計2(Advanced MicrowaveScanning Radiometer2:AMSR2) これらは2002年以降順次打ち上げられたが、実利用に資するために計算手法の簡略化や雑音除去などいくつかの手法を開発した。本稿ではAMSR/AMSR-E/AMSR2での実利用のために適した手法の開発について記述する。2.マイクロ波放射計とその利用の概要2.1 マイクロ波放射計とその観測方法 衛星に搭載されているマイクロ波放射計は地表、海面、大気などから放射されるマイクロ波を受信し海面温度、水蒸気量などを計測するセンサである。 図1にマイクロ波放射計による観測の様子を示す。直径約1.6m~2.0mの主反射鏡(以下主鏡)が1.5秒で1回転することにより地表面を観測することで、地球の扁平率や衛星高度の離心率が無視できるローカルな範囲内で入射角がほぼ一定になるようにデータを取得することが可能となる。これは、コニカルスキャン方式と呼ばれ、マイクロ波観測における地表面の入射角依存性を避ける、地表面からセンサまでの距離を一定に保ち、後の処理が簡便になるセンサ方式である。観測はAMSR-Eで高度約705km(ノミナル)、衛星進行方向に対しておよそ±75°の範囲で行う。そしてこの範囲の観測幅による4日の観測でほぼ全球をカバーする。観測周波数は6.9、10.5、18.7、23.8、36.5、89.0GHzの6つの周波数を基本としてAMSRでは50.3GHzV偏波及び52.8GHzV偏波、AMSR2では7.3GHzVおよびH偏波が、それぞれ温度プロファイル観測、7GHz帯での電波干渉(Radio FrequencyInterference:RFI)対策として追加されている。 同じく図1に示すように地球の地表、海面、大気などから放射されるマイクロ波を主鏡でとらえ一次放射器に導くことにより観測を行う。そして主鏡に対向して一緒に回転する一次放射器は1回転の間にコールドスカイミラー(Cold Sky Mirror:CSM)の下を通過後、主鏡を通して地球方向を見、最後に高温校正源の下を通過する。CSMは2.7Kの深宇宙を見、高温校正源は約300Kに2 MSS技報・Vol.28図1 マイクロ波放射計の観測概要図2 データ取得方法3 MSS技報・Vol.283.レベル1処理の流れ 地球観測データは観測したデータのみでは利用しづらいのでセンサの観測位置、輝度温度などとともに観測時刻などメタデータと呼ばれるユーザが利用するのに必要な情報をあわせて1つのプロダクトにまとめ、一定時間以内にユーザに提供する。観測位置に関連する情報の計算や付与を幾何補正、観測したデータの輝度温度への変換やそれに付随する情報の付与をラジオメトリック補正と呼び、この一連の処理を総称してレベル1処理と呼ぶ。 プロダクトの種類は、観測位置、メタデータを付与し放射計が観測したデジタルカウントをそのまま格納するレベル1A、デジタルカウントを輝度温度に変換して格納するレベル1B、周波数ごとに異なる分解能のデータをリサンプリングし分解能を同じにする処理を施し格納したレベル1R、さらに処理を施し海面水温等の物理量に変換する高次プロダクト等があり、レベル1B以降の処理プロダクトをユーザに提供している。3.1 幾何補正 観測位置は、図4に示すようにアンテナ座標系で表されている主鏡の観測方向ベクトルを観測位置の緯度/経度が計算できる地球固定座標系までいくつかの中間座標を経由して座標変換を行い、観測方向ベクトルと地表面との交点を計算することで求める。中間座標系での変換では姿勢や、地上試験で予め計測済みの機体取り付け誤差などを考慮して観測の方向を計算する。3.2 ラジオメトリック補正 校正源データとして取得した2.7Kおよび約300Kのデジタルカウント値と観測データのデジタルカウント値の比例関係を用いて、観測対象の輝度温度を計算する。概念図を図5に示す。なお、AMSR/AMSR-Eでは比例関係として直線を用いたが、センサの校正・検証の結果保たれた電波吸収体で、それぞれ低温/高温の校正源として機能し、一次放射器がこれらの校正源の下を通過することにより、低温・高温の校正源データを取得する。また一次放射器が主鏡を見る際には地表面の観測データを取得する。図2に観測データ、低温/高温校正源データ取得の概念図を示す。分解能はAMSR2 6.9GHzで約62km、もっとも周波数の高い89.0GHzで約5kmとなる。地表面をもれなく観測するため、89.0GHzは1.3msecごと、他の周波数では2.6msecごとにサンプリングする。衛星進行方向に対しておよそ±75°の観測範囲において、89.0GHzで観測する場合は486点、他の周波数では243点の観測データを取得する。また低温、高温校正源は共に89.0GHzで32点、他の周波数で16点のデータを取得する。これら取得した観測・校正データは衛星が軌道上の降交軌道(日照)・昇交軌道(日陰)の半周回分ごとにプロダクトと呼ばれるファイルにまとめユーザに提供する。なお、プロダクトはその提供するデータの種類によりレベル1、レベル2標準プロダクトに分けられるが、その概要は後述する。2.2 利用例 マイクロ波放射計が観測したデータは輝度温度、海面水温、降水量、海氷の密接度などの物理量に変換され気象庁や漁業情報サービスセンターに配信され、天気予報の基礎資料や漁場の予測に用いられている(5)。最近では北極海の氷域の減少による北極海航路検討のための情報源としても利用されている(6)。なお、物理量への変換は研究者より処理コードが提供され、当社ではそれをシステムに組み込んだ。図3は気象庁でのマイクロ波放射計のデータを利用したことによる降雨予測の改善例で、左の「AMSR2利用」が中央の「AMSR2不使用」の図より実際の「実況解析」(実際の雨量の観測値)に近づいたことを示した図である(7)。 また漁業情報サービスセンターではAMSR2データ等を利用し海況情報を作成、漁業者に配布する「衛星データ処理解析システム」を構築し、「平成25年度 宇宙開発利用大賞」を受賞した(8)。当社も執筆両名が2014年度にJAXA本部長表彰を受賞した(9)。図3 気象庁での利用例図4 幾何補正の概念図4 MSS技報・Vol.28AMSR2では受信機の非線形性を反映した2次曲線を採用した。 またマイクロ波放射計の受信機は入力信号レベルに応じてカウント値を出力する。しかし出力カウント値には入力信号とは無関係の受信機温度に応じた熱雑音が加わる。熱雑音は白色雑音のため、出力カウント値は平均することにより雑音を抑制する。この際平均数を大きくすると温度分解能は向上するが、空間分解能を劣化させるため、実データを用い評価を行い適切な平均数で輝度温度の計算を行った。3.3 データ処理手法の開発の必要性 レベル1処理において幾何補正およびラジオメトリック補正に関して以下の手法開発が必要となった。(幾何補正) マイクロ波放射計は、一次放射器が周波数ごとに設置されているため、すべての周波数が同じ場所を観測することができず周波数によって観測位置にズレが発生する。そのため、周波数ごとに観測位置を算出しプロダクトに格納する必要があった。しかし、AMSR-E打ち上げ当時の2002年の計算機性能では、すべての周波数の緯度経度を算出する性能がなかった。また、周波数ごとの観測位置の提供ではプロダクト容量が大きくなるなど、以下の2点に関して手法開発が必要となった。⑴ 処理時間の削減⑵ プロダクト容量の削減(ラジオメトリック補正) 打ち上げ後観測データにおいて精度に影響を与える以下の現象を確認した。そのためこれらの現象の補正の手法開発が必要になった。⑴ CSMデータに混入する月の影響除去⑵ 地球放射のCSM校正観測データへの漏れ込み(スピルオーバ)の除去4.レベル1処理における手法開発の詳細 幾何補正においては4.1節に述べる相対レジストレーション係数と呼ぶ係数を導入し処理速度/容量の改善を図った。 また月の干渉、スピルオーバに対しては個別に除去する補正を行った。4.2節以降に詳細を述べる。4.1 相対レジストレーション4.1.1 相対レジストレーション係数の概要 2.1節で述べたように89.0GHzが1.3msecごと、他周波数では2.6msecごとにデータを取得する。放射計はこのデータ間隔の間、データを取り続ける。この間隔を積分時間と呼び、積分時間の中心を観測の代表値とし観測位置を付与する。 また各周波数の観測位置を合わせるレジストレーションの様子は図6に示す通りで、89.0GHzのデータ2サンプルの中間点に他周波数の観測点がくるように機器の設計上レジストレーションされている。 通常、地球観測データは周波数ごとなど観測単位ごとに位置情報を付与するため、データ容量が大きくなる。そのため、89.0GHzの2つの観測位置を用いてレジストレーション位置を表す相対レジストレーション係数を用いてデータ容量、処理速度を削減した。 なお、レジストレーション位置は完全に走査線上にあるわけではなく、図7に示すように走査線からオフセットがある。また周波数ごとでも異なるため、周波数ごとに走査方向と走査方向に垂直な方向の2つの係数でレジストレーション位置を表すことにした。図5 ラジオメトリック補正の概念図図6 マイクロ波放射計のレジストレーションの概念図5 MSS技報・Vol.284.1.2 相対レジストレーション係数の定義 図7に相対レジストレーション係数の説明を示す。まず、地心より奇数/偶数観測点位置にむけた単位ベクトル 、 とそのなす角 を計算する。そして、 の方向を 方向、 、 を含む面に直交する方向 、さらに 、 を含む面で の方向を計算し、( )を基準とした3次元の直交座標系を作成する。 この座標系上での任意の方向を、 面に関する任意の方向を角度 と係数 を用いて、 面からの離れ角を同じく係数 を用いて として任意の方向 を以下の式で表す。 これら 、 を相対レジストレーション係数と呼び、打ち上げ前はシミュレーションにより周波数ごとに係数を決定、打ち上げ後は実データを用いて決定した。そしてユーザには89.0GHzの観測位置データのみを提供することにした。以下に打ち上げ後の実データを用いた係数決定方法とその結果の詳細を述べる。4.1.3 相対レジストレーション係数の決定 相対レジストレーション係数を含む幾何パラメータの算出は、各周波数における幾何誤差量(観測していると推定した位置と実際の位置の誤差量)を算出し、その幾何誤差量を補正するパラメータを推定することで決定する。 相対レジストレーション係数の決定は各周波数の正確な観測位置が必要となる。3.1節で述べた幾何補正処理はセンサの観測タイミングやアライメント情報などに基づき観測位置を計算するが、衛星軌道や姿勢の測定誤差、地上でのアラインメント測定誤差などにより誤差が生ずる。そこで実データを用いてまず観測位置の誤差すなわち幾何補正誤差を計測したのちに係数を決定した。以下に幾何補正誤差測定方法及び相対レジストレーション係数決定の方法について述べる。⑴ 幾何補正誤差の測定手法 幾何補正誤差の測定手法の概要を図8に示す。図には、観測とレベル1処理の内容とその主な誤差要因も示している。 マイクロ波放射計では、観測データをGCP(GroundControl Point)とマッチングさせることにより、定常的な誤差傾向を解析し、それを打ち消すための処理パラメータを決定する。 この幾何学的な誤差を測定するために、陸海フラグの中から島などの特徴的な地形をGCPとして利用する。陸海フラグは値が0~100までの規格化画像であるが、これは観測データと高い相関を持つものの、陸や海が均一な輝度ではないなどの「放射輝度と陸/海の相違(図中①)」があり、これが測定の誤差要因となる。また、陸海フラグは緯度、経度方向にサンプリングしたものなので、幾何的に有限な精度があり「陸海フラグ精度(図中②)」に起因する誤差が混入する。さらに、陸海フラグは利用時にL1Bプロダクトのピクセルスペーシング相当に平均間引きしているため、「間引き誤差(図中③)」が混入する。 陸海フラグ中のGCPはその周囲の一定範囲が切り出され、後で行うマッチング処理に備えて内挿処理される。この内挿補間により「内挿誤差(図中④)」が発生する。 一方、L1Bプロダクトの輝度温度データより、陸海フラグを切り出した領域に対応する範囲が切り出される。この範囲はプロダクトに格納された緯度経度情報より決定するので、観測と再生処理による幾何誤差要因がここに含まれることになる。 切り出された輝度温度データは陸海フラグとマッチング処理される。マッチング処理では陸海フラグ上に輝度温度データを重ねて、その相関係数を求める。重ねる位置をプロダクトのピクセルスペーシングよりも細かい刻み幅で変化させていき、相関値が最大となったときの位置を幾何誤差量とする。幾何誤差量は刻み幅単位にて算出されるため「マッチング刻み幅(図中⑤)」よりも小さいズレ量は誤差要因となる。輝度温度データにはラジオメトリックなノイズ(観測ノイズ)が含まれているため輝度温度データの「ノイズの影響(図中⑥)」が、相関最大値を見つける際の誤差要因となり、誤検出されることがある。また、輝度温度データには雲や大気などの影響により輝度温度が変化するため「エッジ形状の相違(図中⑦)」が発生し相関最大値の検出精度に影響を与える。 このように実際の観測データによる幾何補正誤差の他に、図7 相対レジストレーション係数の定義6 MSS技報・Vol.28①から⑦までの幾何誤差量測定方法における誤差要因が含まれるため一定期間のプロダクトを収集して複数のGCPを確保し、各GCPに対して前述の手順を行い複数の誤差量を求めた後、これを統計処理することにより、幾何誤差量測定方法における誤差を除外した誤差傾向を把握する。⑵ 相対レジストレーション係数の算出 各周波数の相対レジストレーション係数は、⑴の手法にて算出された幾何補正誤差を用いて算出する。幾何補正誤差量は、L1Bプロダクトの縦横方向の誤差量として算出され、縦方向は衛星の進行方向、横方向は走査方向の誤差量である。衛星進行方向及び走査方向と相対レジストレーションパラメータ( 、 )の方向は、図9に示す関係となり円を描くように観測するマイクロ波放射計では観測位置(観測始端から終端までの位置)によりベクトルの関係が変化する。そのため、観測位置毎に幾何補正誤差量を衛星進行方向及び走査方向から相対レジストレーションパラメータのベクトル方向に変換することで相対レジストレーションパラメータを算出する。4.2 低温校正源データの補正 打ち上げ後CSMデータに下記の現象を確認した。⑴ CSMに入る月の干渉(4.2.1項参照)⑵ 地球の輝度温度と相関のあるCSMデータ値の上昇(スピルオーバ)(4.2.2項参照) ⑴に関してはCSMデータに月が映り込んだ実データを図10に示す。横軸方向はアンテナ1回転分の低温校正図8 幾何補正誤差の測定方法と誤差要因図9 衛星進行方向及び走査方向と 、 の方向の関係図10 月の影響を受けたCSMデータ(AMSR-E、2002年12月16日)7 MSS技報・Vol.28源データ(16点あるいは32点)を周波数ごとに並べ、縦軸方向は衛星半周回分のデータを画像化したもので、円形で囲んだ部分が月の影響を受けた部分で6.9GHzは分解能が広いため、月の影響は無視できるほど小さいと考えられるが、6.9GHz以外は月の像が確認できる。 ⑵に関しては6.9GHzにおいて一次放射器がCSMデータを取得する際CSM以外からの影響を受けるものでスピルオーバ(漏れ込み)と呼ばれている。一次放射器がCSMをみる際にわずかながら背面の地球表面を見ている主反射鏡が見えていると考えられている。図11はCSMデータ全球1周分を画像化したものである。図11からわかるように大陸などの地表面の形が読み取れる。 以降この2つの現象の発生のメカニズムとその処置手法を述べる。4.2.1 CSMデータへの月の干渉⑴ 月の干渉の発生メカニズム 図12に示すようにCSM面を介した一次放射器の視野に月が入ってくると低温校正源データに月の像を確認できるようになる。そこで一次放射器の視線ベクトルと月のなす角 に基づき、下記の通りに月の干渉を補正する処理を行う。 ⒜ 一次放射器の視線ベクトルと月の位置ベクトルとのなす角度 の算出 ⒝ 月の干渉範囲 の決定 ⒞ 低温校正源データの補正⑵ 一次放射器の視線ベクトルと月の位置ベクトルとのなす角度 の算出 一次放射器の視線ベクトル はセンサ座標系で定義されているため、月の位置を計算する慣性座標系までの座標変換を行う。座標変換は幾何補正のアルゴリズムをそのまま用いた。 月の方向 はNASAが提供しているエフェメリスを使用した(10)。 以上2つのベクトルのなす角は下記の通りで計算する。 :CSM反射面から一次放射器への方向ベクトル :CSM反射面から月への方向ベクトル :一次放射器への方向ベクトルと月の方向ベクトル のなす角⑶ 月の影響と一次放射器の視線ベクトルと月の位置ベクトルとのなす角度 の関係 月の影響と一次放射器の視線ベクトルと月の位置ベクトルとのなす角度の実例を図13に示す。図13の桃色の点は、AMSR-E低温校正源のカウント値を衛星進行方向半周回分表示している。紺色の線は4.2.1⑵項に示す式で計算した の算出値である。 がある値以下になると低温校正源データが月の影響で上昇していき、 が最も小さい時に低温校正源データも最も高い値を示す関係にあることが確認できる。このように一次放射器の視線ベクトルと月の位置ベクトルとのなす角度により月の影響の有無を特定することが可能である。⑷ 低温校正源データの補正 月の影響による低温校正源データの補正の概念図を図14に示す。図中横軸方向はピクセル方向、すなわちアンテナ1回転のデータ点数で、16あるいは32ピクセルであり、図11 6.9GHzV偏波CSMデータ(全球1周分を並べた図)図12 CSMへの月の干渉図13 と低温校正源データとの関係8 MSS技報・Vol.28縦軸方向は衛星進行方向で、1プロダクトは軌道半周回分、およそ2000走査程度のライン数となる。 図中黒の部分が月の像であり、この部分のデータが補正対象となる。そこで、4.2.1⑶項で決めた角度範囲の直前・直後の平均値(水色の部分)を用いて内挿を行い、月の影響を消去する。前述の図13では水色線で示している部分の平均値を用いて補間する。4.2.2 スピルオーバの補正⑴ スピルオーバの発生メカニズム 一次放射器がCSMを観測する際、その背面にある主反射鏡は図15に示すようにCSM越しに地表面を観測している。この放射がCSM越しに一次放射器に映りこみ、低温校正源の値に影響を与えると考えられている。 マイクロ波放射計は、図16に示すように主反射鏡が一回転する間にCSMデータ、観測データ、高温校正源データの順にデータを取得する。マイクロ波放射計は、衛星進行方向に進みながらデータ取得を行うため、図17に示す様にCSMデータ取得時に主反射鏡がみている地上の位置を一定時間前に観測データ取得時に観測している。そのため、観測データを用いることにより地表からの影響を推定することが可能となる。⑵ スピルオーバの補正方法 観測データ取得からCSMデータ取得時に主反射鏡が地上を見るまでには一定の時間が経過しているため、地球の自転の影響により、衛星の進行速度及び走査方向への観点が常に一定であっても影響を受ける位置が変化する。 また、CSMデータ取得時に主反射鏡が見ている地球の位置を正確に算出するには緯度経度を算出するのと同様に大きな処理能力が必要となる。そこで、地球の自転の影響を三角関数にて近似する。 主反射鏡による地球放射の影響量の算出及び補正は、処理対象の衛星進行方向の位置( )より 前における走査方向の位置( )の観測データの輝度温度を用いて以下の方法で行う。 ⒜ 地球自転距離( )の算出 観測点の緯度引数( )を衛星位置の緯度引数( ) より求める。以下の計算式に用いる緯度引数は とする。図14 低温校正源データ補正の概念図図16 観測データ取得スケジュール図15 スピルオーバの発生メカニズム概念図図17 地上観測点とCSM観測点の分布9 MSS技報・Vol.28 :主反射鏡観測半径(主反射鏡が地表面を観測 時に描く円の半径) :CSM観測間隔角度(CSMを観測時に主反射 鏡が回転する角度) :観測中心位置(観測データの観測中心におけ る番号) :地球半径 各走査の観測点の緯度( )を観測点の緯度引数( )より近似し求める。 :衛星の軌道傾斜角 地球を球体と簡略化し、緯度から距離を求める。 求めた観測点の緯度より、地球自転距離( )を求める。 地球自転距離( )を走査方向( )と走査方向に垂直な方向( )に分ける。 ⒝ 影響している観測データ位置( 、 )の算出 CSMに影響を与えている観測データの位置( 、 ) を算出する。 :衛星進行方向の観測間隔 ⒞ 影響している観測データ( )の決定 上記⒝の位置 と より、影響している観測データ (輝度温度)は、以下となる。 :補正するCSMの走査番号 ⒟ 地球放射の影響補正 影響している観測データ( )を中心とする × の範囲の平均値( )を算出する。 上記で求めた より、以下で求める影響量をCSM観測データのアンテナ温度に加えることで補正する。 :主反射鏡を介した地球放射の影響による CSMアンテナ温度上昇量(K) :影響量係数 :影響量バイアス補正係数 :観測点番号 なお、影響位置 及び 、平均数 、 、補正係数 、 は、実データを用いて計算したものを用いる。5.むすび 2002年打ち上げ以降マイクロ波放射計データ処理に携わり様々な手法を開発してきた。計算機性能の向上やデータ容量と利便性の兼ね合いなどを考慮したデータ処理の改善や、他のセンサへの応用に経験を活用していきたい。 なお本手法開発においては多くの方から指導・助言をいただきました。システム開発時に貴重な指導・助言をいただいた宇宙航空研究開発機構 竹島敏明殿、笠原希仁殿、データ利用に関しての助言や海外との調整に協力いただいた山口大学 今岡啓治殿また同機構 地球観測研究センター 可知美佐子殿、前田崇殿、また放射計に関する詳細な情報を提供いただいた三菱電機 石川貴章殿、野口龍彦殿以上の方々には深く感謝申し上げます。参考文献⑴ 宇宙航空研究開発機構:Aqua AMSR-E レベル1プロダクト フォーマット説明書(MAS-100045A)⑵ 宇宙航空研究開発機構:AMSR レベル1プロダクト フォーマット説明書(NEB-01040E)⑶ Goldstein,H.:古典物理学(上、下),吉岡書店⑷ Press,W. H. et al.:Numerical Recipes in C,Cambridge University Press(1992)⑸ 宇宙航空研究開発機構 地球観測利用推進センター:気候変動の解明に向けて-AMSR/AMSR-Eによる水惑星観測-http://sharaku.eorc.jaxa.jp/AMSR/doc/index_j.html⑹ 国立極地研究所:2014年夏季の北極海海氷分布予報を公開http://www.nipr.ac.jp/info/notice/20140530.html⑺ 隈 健一:気象庁における雨量予測の現状と展望 衛星観測への期待,熱帯降雨観測衛星(TRMM)15周年記念シンポジウム⑻ 内閣府:宇宙開発利用大賞について(第1回平成25年度)http://www8.cao.go.jp/space/prize/prize.html⑼ 三菱スペース・ソフトウエア株式会社:MSSニュース,74(2014)10 MSS技報・Vol.28⑽ NASA:EOSDIS Core System Project SDPToolkit/HDF-EOShttps://newsroom.gsfc.nasa.gov/sdptoolkit/toolkit.html執筆者紹介谷口 悠司2001年入社。マイクロ波放射計(AMSR、AMSR-E、AMSR2)のデータ処理アルゴリズムの開発及びデータ精度向上に向けた解析業務を担当。山梨 正人1982年11月入社。通信衛星「さくら2号」の運用を担当以後、主に海洋観測衛星、環境観測技術衛星、NASAAqua、水循環変動観測衛星に搭載されたマイクロ波放射計のデータ処理アルゴリズム、その他の地上システムの開発に従事。なお92年~95年、03年~07年、10年~15年に宇宙航空研究開発機構に出向。