テクノロジー
技術レポート:アーカイブ
Category:ロケット・宇宙機・人工衛星開発
月周回衛星「かぐや」画像データの幾何補正
つくば事業部では、月周回衛星「かぐや」に搭載された月面撮像/分光機器(LISM)データの輝度校正・幾何補正システムを開発した。本稿では、LISM画像の幾何補正手法と、「かぐや」打上げ前にCG画像を用いて行った幾何精度検証の結果および実データに対する幾何補正に関する初期解析結果について報告する。
参考情報:
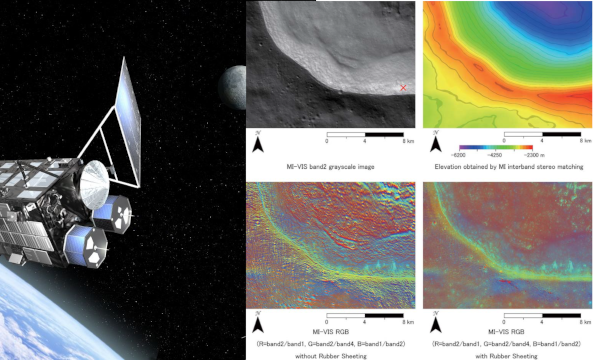
MSS技報・Vol.21 26技術論文*つくば事業部 第一技術部 月周回衛星「かぐや」画像データの幾何補正 Geometric correction for the image data of SELENE 橋本 若路* 鳥井 健司* 藏品 豊* Mozi Hashimoto, Kenji Torii, Yutaka Kurashina つくば事業部では、月周回衛星「かぐや」に搭載された月面撮像/分光機器(LISM)データの輝度校正・幾何補正システムを開発した。本稿では、LISM画像の幾何補正手法と、「かぐや」打上げ前にCG画像を用いて行った幾何精度検証の結果および実データに対する幾何補正に関する初期解析結果について報告する。 The TBO(Tsukuba Branch Office)developed the radiometoric calibration and geometriccorrection system for the data observed by the Lunar Imager/SpectroMeter(LISM)carried bySELENE. In this article, we describe the geometric correction method for the LISM image data, thegeometric accuracy verification results using CG images prior to the launch of SELENE, and theearly analysis results of actually observed data regarding geometric correction. 1.はじめに つくば事業部では、月周回衛星「かぐや」に搭載された月面撮像/分光機器(LISM)データの高次処理を行う輝度校正・幾何補正システム(RGC:LISM RadiometricCalibration and Geometric Correction system)を開発した。RGCは、JAXA相模原キャンパスに整備され、LISMデータの処理運用に供されている。 LISMは、マルチバンドイメージャ(MI)、地形カメラ(TC)、スペクトルプロファイラ(SP)の3つの機器で構成される(1)(2)。このうち画像センサは、MIとTCである。 MIは、可視~近赤外波長域に9つの観測バンドを有するマルチバンドのラインセンサである。我々は、画像を1画素単位で任意変形することにより、異バンド画像間の幾何学的歪みを補正する高精度かつ高速なラバーシーティング手法を開発した。また、バンド間の視差を利用してステレオ法で月面の三次元地形を得ることにより、月面地質解析の精度向上に寄与することができるようになった。 TCは、前方視と後方視のラインセンサで観測した画像から、ステレオ法により月面の数値地形モデル(DTM:Digital Terrain Model)を作成する。TCステレオペア間の視差は比較的大きく、画像の幾何学的歪みのために画像マッチングの精度が低くなる場合があるが、我々は上記のラバーシーティング手法で任意変形した画像を再度マッチングに供するというイタレーションを行うことで、高精度化を実現した。この手法はMSSで特許登録済みである。 本稿では、LISM画像データの幾何補正手法について記し、CG画像を用いて行った事前精度検証の結果と、実観測データに対する初期解析結果(3)について報告する。2.LISM画像センサの概要 MIは、可視~近赤外波長域(MI-VIS)に5つの観測バンド、近赤外波長域(MI-NIR)に4つの観測バンドを有する2本の直下視光学系で構成される。MI-VISとMI-NIRは、それぞれ二次元センサ素子平面上の5本および4本の素子ラインに、各波長のバンドパスフィルタを有しているが、その位置がそれぞれ異なるため、各バンドは互いに視差を有している。 TCは、一次元CCDを搭載した2本の望遠鏡で構成され、それぞれ15deg前方視と15deg後方視になるように衛星に搭載されて、ステレオ法によりDTMを得る。また、単眼視による全球観測も行う。 MIとTCの諸元を表1に示す。3.LISM画像データの幾何補正手法 MIによる観測の目的は、月面の地質解析を行うことである。そのためには、高いバンド間レジストレーション精度が必要であるが、MIでは各バンドが互いに視差 27技術論文ルでの最適マッチング位置を得る。 RGCでは、画素値の分散が小さい領域でマッチング精度が低下するという問題に対応するために、相関窓内の画素値の変動係数に閾値を設け、閾値に満たない場合は、その相関窓のサイズを拡大するという手法を適用した。 ローカルエリアマッチングで得られるディスパリティには、ミスマッチングや微小なマッチング誤差が含まれている。明らかなミスマッチングは除去できる可能性があるが、微小なマッチング誤差を除去することは困難である。そこで、ミスマッチングであるとないとに関わらず、各画素のディスパリティを、その周囲の画素で得られたディスパリティから求めた近似二次曲面の値で置き換えることとした。これにより、ミスマッチングを除去し、かつ微小なマッチング誤差が均されて滑らかなディスパリティが得られるだけでなく、マッチング精度が有意に向上するという効果が得られた。 CG画像を用いた解析では、これらの手法を適用することにより、画像全体でのディスパリティ誤差標準偏差を5分の1程度にまで小さくすることができた。3.2 ラバーシーティング MIのバンド間視差によって生じた画素位置のずれを修正するためには、画像を幾何変換する必要がある。 地図投影を行う場合など、幾何変換前画像の各画素に対応する幾何変換後の画像座標が既知である場合、小領域分割法(8)を適用できる。MIでは、バンド間でサブピクセルレベルのローカルエリアマッチングを行って、マッチング基準画像の各整数画像座標に対応するマッチング参照画像の実数画像座標を求め、この対応関係を用いてマッチング基準画像をマッチング参照画像座標系に幾何変換すればよい。しかし、小領域分割法では、小領域が大きければ誤差が増大し、逆に小領域が小さければその数が増えるため、幾何変換式の係数を求める計算負荷が増大する。 そこで我々は、逆にマッチング参照画像の方を幾何変換する手法を考案した。すなわち、ローカルエリアマッチングで得られた最適マッチング位置におけるマッチング参照画像実数画像座標の画素値を、周囲のマッチング参照画像画素値から内挿することにより、マッチング参照画像をマッチング基準画像座標系に幾何変換する。 この手法では、幾何変換の近似式を用いないため、ローカルエリアマッチング結果に対して厳密な幾何変換を行うことができる。また、最小二乗法等によって幾何変換近似式を求める必要がないため、計算負荷を大幅に削減することが可能である。を有しているため、画像の幾何学的歪みを補正する必要がある。 MIの各バンド画像に対しては、観測時の光学条件に依存するセンサ検知反射率を、一定の光学条件における反射率(絶対反射率)に規格化する位相角補正(4)(5)を行う。正確な位相角補正を行うには月面の三次元形状が必要となるが、従来の月探査機による観測(6)では、月面を球面であると近似していた。 一方、TCでは、前方視と後方視の視差が約30degと比較的大きく、地形の起伏が大きいと、画像の幾何学的な歪みのためにローカルエリアマッチング(画素ごとに、その周囲の局所領域を相関窓として行うテンプレートマッチング)の精度が低くなる。 我々は、高精度なローカルエリアマッチング手法と、MIバンド間レジストレーションのための高精度かつ高速な画像の任意変形手法を新たに考案した。また、MIのバンド間視差を利用してステレオ三次元計測を行い、月面の三次元形状を考慮することが可能になった。3.1 ローカルエリアマッチング MIとTCはプッシュブルーム方式のセンサであるため、ディスパリティ(最適マッチング位置への移動量)は主に画像の上下方向に生じるが、ローカルエリアマッチングに際しては、各種誤差を考慮して、画像の左右方向にも若干の探索範囲を設ける二次元探索を行う。 マッチングは相互相関係数を用いて粗密探索(7)を行い、整数画像座標で得られた最適マッチング位置近傍の相関係数分布を二次関数で近似して、サブピクセルレベ表1 MIとTCの諸元MI-VIS MI-NIR TCF number 3.7 3.7 4.0Spatial resolution(m/pixel)@100km altitude 20 62 10Swath width(km)@100km altitude 19.3 19.6 41, 35, 17.5Band assignment(nm)band1 : 415band2 : 750band3 : 900band4 : 950band5 : 1000band1 : 1000band2 : 1050band3 : 1250band4 : 1550430 - 850Off-nadir angle(deg)band1 : 5.5band2 : 2.7band3 : -5.5band4 : -2.7band5 : 0.0band1 : 1.3band2 : 4.0band3 : -4.0band4 : -1.3+/-15Quantization(bit) 10 12 10S/N > 100 > 300 > 100Data compression DPCM(loss-less) N/ADCT(lossy)andnon-compressionmodeMSS技報・Vol.21 28tion)、暗電流、素子間感度偏差等の機器特性誤差やランダムな光ショットノイズを付与し、整数画素値に量子化して、MIおよびTCの模擬画像を数十シーンずつ作成した。TC模擬画像には非可逆圧縮を施した。MI月面模擬画像の例を図1に示す。なお、画像マッチングに先立って行う輝度校正では、暗電流および素子間感度偏差の校正係数に誤差を与えた。 表2に、ローカルエリアマッチングの精度を示す。これは、最適化した一意のマッチングパラメタを全ての模擬画像に適用して得られた、全ての画素についてのディスパリティ誤差の標準偏差である。表2ではステレオ三次元計測で得られた標高の誤差標準偏差も併せて示したが、ディスパリティから三次元座標を求める際に、センサ位置・姿勢やレンズ歪の推定誤差を付与しておらず、純粋にマッチング誤差の標高精度への寄与を表している。表2より、ステレオペア間の視差が小さいMIでは、ディスパリティ誤差標準偏差が0.1画素未満となったのに対して、視差が大きいTCでは、アロングトラック方向の誤差が大きくなっており、マッチング自体の精度はMIの方が高いことが分かる。一方、標高誤差標準偏差は、MI-VISが21.0m、MI-NIRが46.0mとなったのに対して、TCでは7.4mとなり、解像度と視差の違いために、精度が逆転している。 表3に、衛星位置・姿勢とレンズ歪の推定誤差として、それぞれ想定される最悪値に近い誤差を付与して得られたステレオ三次元計測精度を示す。表2と比較して三次元計測精度が著しく低下し、これらの誤差が大きな影響を与えることが分かる。3.3 ラバーシーティング・マッチング マッチングする画像間の幾何学的歪みが大きいと、ローカルエリアマッチングの精度が低下する。LISMの場合、TCでは、ステレオペア間の視差が約30degと比較的大きいため、その影響が大きい。 そこで我々は、3.2項に示した、ローカルエリアマッチング結果に基づいてラバーシーティングした画像を、再度マッチングに入力するというイタレーションにより、マッチングの高精度化に成功した。この手法は、地形の起伏が大きい場合に特に効果が顕著であり、TCのCG画像を用いた解析では、画像全体でのディスパリティ誤差標準偏差が、3.1項の手法に対して10分の1未満になった例もあった。なお、本手法はMSS単独で特許登録済み(特許番号4560023号)である。4.月面模擬画像を用いた事前精度検証結果 「かぐや」の打上げに先立って、CGで作成したLISMの月面模擬画像を用いて幾何補正精度の検証を行った。 月面模擬画像の地形として、Apolloミッション等で得られた月面地形の等高線マップ(9)から得られた各種概略地形上に、フラクタルで発生させた微細な地形起伏と、モデル(10)(11)に従って生成した模擬クレータを付与したDEM(Digital Elevation Model)を作成した。 このDEMの各格子点に対して、地質の違いを模擬したランダム誤差込みの月面反射率を与え、衛星軌道・姿勢誤差、衛星機体振動、レンズ歪等を考慮して月面反射モデル(4)に従ったレンダリングを行い、得られた月面反射率に対して、MTF(Modulation Transfer Func-図1 MI月面模擬画の例29技術論文5.実観測データの初期解析結果 ここでは、実観測データの幾何補正に関わる初期解析結果を示す。 図2に、Doerfel Sクレータ(南緯69deg・西経121deg)におけるラバーシーティングの効果を示す。下段左側の図は、シーン全体でマッチングを行ってバンド間の相対位置を調整したRGB画像であるが、色ずれを起こしていることが分かる。一方、下段右側の図は、ラバーシーティングを施して得られたRGB画像であるが、高いバンド間レジストレーション精度が得られている。σ MI-VIS MI-NIR TCHorizontal position(along-track direction)(m) 15.2 15.6 12.5Horizontal position(cross-track direction)(m) 27.1 27.2 18.0Elevation(m) 88.1 112.1 20.8表3 RGC事前精度検証結果(略最悪値幾何学的誤差付与)図2 MIラバーシーティングの効果(©JAXA/SELENE)表2 RGC事前精度検証結果(幾何学的誤差なし)σ MI-VIS MI-NIR TCHorizontal position(along-track direction)(m) 1.4 2.2 2.1(pixel) 0.07 0.03 0.21Horizontal position(cross-track direction)(m) 1.8 3.7 0.8(pixel) 0.09 0.06 0.08Elevation(m) 21.0 46.0 7.4MSS技報・Vol.21 30計測を施した画像では、画像のずれが解消しただけでなく、ローカルな地形効果を補正することにより、中央丘付近の絶対反射率がほぼ一様であることが示されている。 図5に、Apollo15号宇宙飛行士が月面で撮影した写真(http://history.nasa.gov/alsj/a15/AS15-82-11122.jpgの一部)と、RGCでMIおよびTCのステレオ三次元計測を行って得られた月面地形に基づいて作成したCG画像を対比して示す。MIとTCのCG画像のテクスチャは、それぞれの画像データの画素値を適用した。撮影時の太陽位置が異なるため、それぞれ明暗パターンが異なっているが、RGCで作成した地形は、実際に月面で撮影された地形と良く一致しており、三次元計測が良好に行われていると言える。 図3に、図2上段左側のグレイスケール画像で×印を付けた地点について、位相角補正によって、MI各バンドの反射率を標準光学条件(入射角30deg・出射角0deg・位相角30deg)に規格化して得られた絶対反射率を、バンド間ステレオ三次元計測による地形効果補正を適用した場合と適用しない場合を対比して示す。地形効果補正を行わない場合、得られた各バンドの反射率は非現実的なほど大きな値になっているが、地形効果補正を行うことにより、適正に補正されていることが分かる。 図4 に、Pythagorasクレータ(北緯64deg・西経63deg)の中央丘付近について、月面を球面であると近似して地図投影した位相角補正済みモザイク画像と、バンド間ステレオ三次元計測によって得られた地形を考慮して地図投影した位相角補正済みモザイク画像を対比して示す。位相角補正後の絶対反射率が0.655以上になった画素は、補正エラーであると見なして画素値をゼロとした。月面を球面であると近似した上段の画像では、隣接する軌道間でクロストラック方向の地形の倒れ込みに起因するずれが生じている。またローカルな地形起伏に起因するセンサ検知反射率の変動が補正されておらず、中央丘の斜面では反射率が非現実的な大きな値になっている箇所がある。これに対して、下段のステレオ三次元図5 Apollo宇宙飛行士が撮影した写真とMIおよびTCデータをRGCで処理して得られたCG画像1.00.80.60.40.20.0200 600 1000 1400without topographic correctionwith topographic correctionWavelength(nm)Reflectance(ND)図3 MI地形効果補正図4 MIバンド間ステレオ三次元計測の効果31技術論文⑻ 橋本若路:月周回衛星画像の幾何補正,MSS技報,vol.14,pp.1~6,2002.⑼ Lunar Programs Office,NASA Headquarters:Lunar Topophotomap, Washington,D.C., 1974.⑽ Grant H. Heiken et al.:Lunar Sourcebook-auser's guide to the moon,Cambridge Univ. Press,Cambridge, 1991.⑾ H. J. Melosh:Impact Cratering:A Geologic Process,Oxford Univ. Press,Oxford,1988.⑿ かぐや(SELENE)データアーカイブ https://www.soac.selene.isas.jaxa.jp/archive/⒀ M. Ohtake et al.:The global distribution of pureanorthosite on the Moon,Nature 461(7261),pp.236~240,2009.⒁ 橋本若路et al.:月着陸機のための2台のカメラを用いたモーションステレオによるDEM照合画像航法 ~かぐや(SELENE)地形カメラデータの応用例として~, 計測自動制御学会第34回リモートセンシングシンポジウム講演論文集,pp.47~50,2008.⒂ M. Hashimoto et al.:DEM matching imagenavigation by motion stereo for the future lunarand planetary explorers, Proceedings of the 19thWorkshop on JAXA Astrodynamics and FlightMechanics,pp.343~349,2009.⒃ 鳥井健司et al.:月探査機のための画像を用いた地形照合航法 ~模擬画像照合航法とDEM照合航法~,第53回宇宙科学技術連合講演会講演集, pp.163~168,2009.⒄ S. Nishida et al.:A Mobility System for LunarWork Rover,27th ISTS, 2009-k-19,2009.6.むすび LISMデータの高次処理を行う地上処理システムRGCで適用している幾何補正手法について記し、CG画像を用いた事前精度検証の結果と、実観測データの初期解析結果の一部について報告した。RGCで処理されたデータはインターネットを通じて公開されており(12)、月面の地質に関する研究成果(13)が出始めている。 今回開発した幾何補正の手法は、今後実現が期待される月・惑星探査ミッションの画像リモートセンシングに適用することができるだけでなく、月・惑星周回衛星や着陸機(14)(15)(16)あるいは探査ローバ(17)の画像航法にも応用できると考えられる。 本稿で使用したLISM実観測データは、本研究での使用のためにJAXA殿からご提供いただきました。 RGCの開発および本稿の源泉となった参考文献⑶の執筆に際しては、JAXA大竹真紀子様、春山純一様、国立環境研究所松永恒雄様、横田康弘様にお世話になりました。東京大学岩崎晃教授には、画像処理全般について、ご助言を頂きました。ここに謹んで謝意を表します。参考文献⑴ J. Haruyama,T. Matsunaga,M. Ohtake et al.:Global lunar-surface mapping experiment usingthe Lunar Imager/Spectrometer on SELENE,Earth Planets Space,60⑷,pp.243~255,2008.⑵ JAXA月周回衛星「かぐや(SELENE)」ホームページ http://www.kaguya.jaxa.jp/ja/equipment/tc_j.htm⑶ 橋本若路,et al.:月周回衛星「かぐや(SELENE)」マルチバンドイメージャデータの幾何補正, 日本リモートセンシング学会誌,30⑵,pp.90~104,2010.⑷ A. McEwen et al.:Summary of RadiometricCalibration and Photometric NormalizationsSteps for the Clementine UVVIS images,Proceedings of the 29th Lunar and PlanetaryScience Conference, Houston, United States, 1466,Mar.1998.⑸ M. Ohtake et al.:Performance and scientificobjectives of the SELENE(KAGUYA)MultibandImager, Earth Planets Space,60⑷,pp.257~264,2008.⑹ E. Eliason et al.:THE CLEMENTINE UVVISGLOBAL LUNAR MOSAIC,Clementine UVVISDigital Image Model CD-ROM,1999.⑺ 高木幹雄,下田陽久(監修):新編 画像解析ハンドブック,東京大学出版会,2004.