テクノロジー
技術レポート:アーカイブ
Category:回路設計
デジタルプリディストーション技術を用いた広帯域低歪増幅器
近年のA/D、 D/A 及び、デジタル回路の発展により、歪補償の一つであるデジタルプリディストーション技術が活用されはじめ、高度なシステムを構築するには必要不可欠な技術となっている。今回、帯域幅 5MHz の 256QAM信号に対して、隣接チャンネル漏洩電力 5 7.1 dB 、歪補償量 1 7.3 dB の優れた性能を有する DPD 増幅器を実現したので、その開発内容を報告する。また、バイアス回路を変えた 2 種類の増幅器について、増幅器の動的モデルの抽出を行い、歪補償ありと歪補償なしの特性を検証し、高い精度でモデル化できている結果を得たので、モデル化に関する内容についても報告する。
参考情報:
- この技術レポートは、当社が展開する組込みソリューション事業の回路設計ソリューションに係る技術について著述されたものです。
- 回路設計ソリューションは、通信機事業所が提供しています。
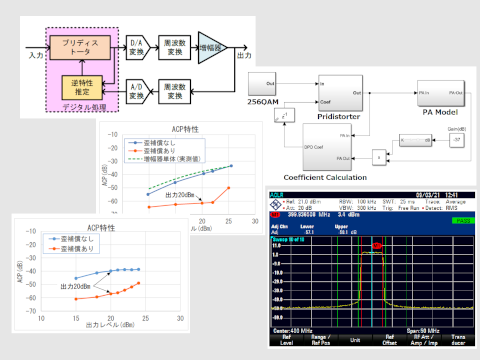
デジタルプリディストーション技術を用いた広帯域低歪増幅器 土谷 和之 1. まえがき 急速な通信分野の発展にともない,通信量は大幅に増加している。これを実現するために通信信号の多値化,広帯域化及び,マルチチャンネル化が進み,通信装置にはこれに対応していくことが求められ,多くの要求事項を満たす必要がある。その1つに,送信用増幅器の高効率化があり,装置全体の消費電力や大きさ,製品コスト,ランニングコストなどを決定する重要な要件となっている。送信用増幅器を高効率で動作させるには,増幅器を飽和電力付近で動作させる必要があるが,飽和電力付近では線形性が低下し,大きな信号歪が生じる。信号歪の一部は近接する信号帯域へ漏洩し,システム性能の低下を引き起こすため,歪性能には厳しい値が要求されている。送信用増幅器にとっては,トレードオフの関係にある高効率化と低歪化の両立が非常に難しく重要な課題となっており,古くから様々な研究や取組みがなされている。一般的に,高効率化と低歪化の両立を増幅器のみで達成することは困難であるため,歪補償回路を付加し,全体で高効率化,低歪化を達成する手段がとられている。歪補償回路は高効率化と低歪化を達成する重要な技術であるため,様々な手法が考案され,実用されている。代表的な方式と特徴を表 1 に記す。表 1.代表的な歪補償方式方式 歪補償量 帯域幅 小型化 省電力化デジタルプリディストーション〇 ◎ 〇 〇フィードフォワード◎ ◎ △ △フィードバック 〇 △ ◎~〇 ◎アナログリニアライザー△ 〇 ◎ ◎2020 年度MMS 技報にフィードフォワード歪補償を用いた高効率,広帯域増幅器の開発を報告している(1)。フィードフォワード歪補償はその構成上,小型化,低消費電力化に課題が残る方式であり,更なる改善が期待できる方式としてデジタルプリディストーション(Digital Pre-Distortion(以下DPD という))歪補償がある。近年のA/D,D/A 及び,デジタル回路の発展により,広帯域で高い歪補償量を小型で実現できるDPD 歪補償が様々なシステムで用いられはじめ,高度なシステム構築に必要不可欠な技術となっている。今回,信号帯域幅5MHz で隣接チャンネル漏洩電力-55dB 以下,歪補償量15dB 以上を実現するDPD増幅器の開発を行ったので,その開発内容を本稿に報告する。DPD 増幅器の開発にはMATLAB®及び,Simulink®を用いたモデルベース開発を適用している。また,増幅器の動的モデルの抽出とモデルを用いた歪補償の効果検証を行い,高い精度でモデル化と歪補償効果の検証ができることを確認したので,それらの内容についても報告する。 2. 増幅器の特性2.1 振幅,位相,効率特性図 1 に400MHz 帯AB 級増幅器の振幅と位相特性を,図2 に効率特性の実測値を記す。図 1.増幅器の振幅,位相特性図 2.増幅器の効率図 1 から飽和電力付近で振幅と位相特性が変化し非線形性が生じていること,図 2 から飽和電力に近いほど効率が高くなることが分かる。-80-75-70-65-60-55363738394041-10 -5 0 5 10 15 20 25 30 35位相(°)振幅(dB)出力レベル(dBm)振幅特性位相特性010203040506070800 5 10 15 20 25 30 35効率特性(%)出力レベル(dBm)デジタルプリディストーション技術を用いた広帯域低歪増幅器22.2 隣接チャンネル漏洩電力図 3 に2.1 節の増幅器から5Msps,256QAM 変調信号を21dBm で出力したときのスペクトラム(歪補償なし)を記す。図 3.出力スペクトラム図 3 から離調6MHz,帯域幅5MHz での隣接チャンネル漏洩電力(Adjacent Channel leakage Power(以下ACP という))が最悪値で-40.6dB であることが分かる。ACP は増幅器の非線形特性による信号歪であり,隣接するチャンネルへ妨害を与える信号となる。ACP には様々な規格があり,4G や5G 基地局では-50dB 以下,システムによっては-55dB以下と厳しい性能が要求される。3. DPD 歪補償図 4 にDPD 歪補償の基本構成を記す。図 4.DPD 歪補償の基本構成増幅器と逆特性となる信号をデジタル処理にて生成し,その信号を増幅器へ入力することにより,全体として線形性を向上させるものである。歪補償動作のイメージを図 5に記す。図 5.歪補償動作イメージプリディストータ部では,LUT(Look Up Table)や多項式を用い逆特性となるベースバンド信号を生成し,D/A 変換後のアナログ信号を増幅器へ入力する。増幅器の特性は温度や電源電圧などの影響で変化するため,良好な特性を維持するために,増幅器の出力の一部をフィードバックし,増幅器の逆特性を推定し,LUT 又は多項式の係数を最適値となるように更新する。なお,周波数変換はデジタル処理でもアナログ回路でも実現可能である。4. DPD 増幅器の開発4.1 目標性能表 2 に今回開発を行ったDPD 増幅器の目標性能を記す。増幅器には2.1 節の増幅器を用いている。表 2.目標性能項目 目標性能 備考周波数 400MHz変調仕様 5Msps,256QAM,α=0.1出力電力 20dBm 増幅器後段ロス1dBACP(歪補償あり)-55dB 以下 離調周波数6MHz積分帯域幅5MHz歪補償量 15dB 以上4.2 特性計算(シミュレーション)図 6 にDPD シミュレーターの構成図を記す。シミュレーターにはMATLAB®及び,Simulink®を使用しており,増幅器モデルには図 1 の振幅,位相特性をLUT にて模擬している。また,D/A,A/D 及び,周波数変換は行わず,ベースバンドの直交座標上にて特性計算を行っている。図 6.DPD シミュレーター構成図プリディストータD/A変換周波数変換増幅器周波数変換A/D変換逆特性推定入力出力デジタル処理入力出力プリディストータ特性入力出力増幅器特性+ =入力全体特性出力理想理想実特性逆特性デジタルプリディストーション技術を用いた広帯域低歪増幅器3図 7 にACP シミュレーション結果を記す。図 7.ACP シミュレーション結果図 7 から,増幅器単体特性(歪補償なし)は実測値とシミュレーション値が良く一致した結果であり,シミュレーションが実機を模擬できていることが分かる。出力電力20dBm で,歪補償を行った場合のACP は-61.0dB と目標性能-55dB 以下を達成する結果である。4.3 FPGA 設計デジタル処理をFPGA で実現するため,図 8 に記すフローでHDL コードを生成している。DPD 処理にはモデルベース設計を,D/A やA/D,PC インターフェースなどには従来の設計手法を適用している。図 8.FPGA 開発フローモデルベース設計を適用することにより,従来の設計手法に比較して開発期間を大幅に短縮している。4.4 DPD 増幅器の構成図 9 にDPD 増幅器の概略構成を記す。図 9.DPD 増幅器概略構成直交変復調器を内蔵する高速D/A 変換器と高速A/D 変換器を用いた構成であり,1GHz サンプリングにて400MHzの信号を直接生成するダイレクトRF 構成としている。また,高速A/D 変換器とFPGA 間にはJESD204B インターフェースを用い高速シリアル通信にてデータの受け渡しを行っている。4.5 DPD 増幅器の性能図 10 にDPD 増幅器のACP 特性を記す。図 10.ACP 特性図 10 から出力電力20dBm におけるACP は歪補償なしで-39.8dB,歪補償ありで-57.1dB と目標性能を満足するものであり,シミュレーション値の-61.0dB に近い結果である。図 11 に20dBm 出力のスペクトラムを記す。図 11.出力スペクトラム図 3 のスペクトラム(歪補償なし)に比較して,図 11のスペクトラム(歪補償あり)では,上下帯域ともに歪レベルが低下していることが分かる。各サンプリング点における変調入力信号と増幅器出力信号との振幅誤差,位相誤差を図 12,図 13 に記す。-70-60-50-40-30-20-105 10 15 20 25 30ACP(dB)出力レベル(dBm)ACP特性歪補償なし歪補償あり増幅器単体(実測値)出力20dBm256QAMDPDD/A変換器DUC高速D/A400MHz高速A/DDDCJESD204BJESD204BA/D変換器FPGACLK(1GHz)LPF AMPPA-70-60-50-40-30-20-1010 15 20 25 30ACP(dB)出力レベル(dBm)ACP特性歪補償なし歪補償あり出力20dBmデジタルプリディストーション技術を用いた広帯域低歪増幅器4図 12.振幅誤差図 13.位相誤差図 12,図 13 から振幅誤差,位相誤差ともに歪補償ありで小さくなっており,増幅器出力信号の線形性が改善していることが分かる。表 3 にDPD 増幅器の性能をまとめる。表 3.DPD 増幅器性能項目 目標値 性能 評価ACP(歪補償あり) -55dB 以下 -57.1dB 〇歪補償量 15dB 以上 17.3dB 〇4.6 増幅器動的モデルの検証増幅器の入力信号と出力信号を用いることにより,増幅器の動的モデルを抽出することができる。今回,振幅,位相特性が同じ2 つの増幅器を用いた動的モデルの検証を行ったので,その結果を以下に報告する。4.6.1 DPD 増幅器で用いた増幅器DPD シミュレーターのPA(Power Amplifier)モデルに抽出した動的モデルを用い歪特性を計算する。歪補償なしのスペクトラムを図 14 に,歪補償ありのスペクトラムを図15 に記す。図 14.スペクトラム(歪補償なし)図 15.スペクトラム(歪補償あり)図 14,図 15 からノイズフロア領域に若干の差が見えるが,実測値とシミュレーション値が良く一致しており,高い精度でモデル化できていることが分かる。なお,ノイズフロア領域の特性差は,量子化誤差による影響である。4.6.2 バイアス回路変更の増幅器4.6.1 項の増幅器のバイアス回路を変更し,同様の計算を行ったときの歪補償なしのスペクトラムを図 16 に,歪補償ありのスペクトラムを図 17 に記す。図 16.スペクトラム(歪補償なし)-6-5-4-3-2-10123456-5 0 5 10 15 20 25 30振幅誤差(dB)D/Aレベル(PA出力レベル相当)歪補償なし歪補償あり-50-40-30-20-1001020304050-5 0 5 10 15 20 25 30位相誤差(°)D/Aレベル(PA出力レベル相当)歪補償なし歪補償あり-90-80-70-60-50-40-30-20-10010-15 -10 -5 0 5 10 15レベル(dBm)周波数(MHz)※400MHz基準歪補償なし実測値シミュレーションACP(low,up)実測:-40.3dB,-44.0dBSIM :-40.5dB,-44.3dB-90-80-70-60-50-40-30-20-10010-15 -10 -5 0 5 10 15レベル(dBm)周波数(MHz)※400MHz基準歪補償あり実測値シミュレーションACP(low,up)実測:-58.4dB,-59.4dBSIM :-60.7dB,-61.6dB-90-80-70-60-50-40-30-20-10010-15 -10 -5 0 5 10 15レベル(dBm)周波数(MHz)※400MHz基準歪補償なし実測値シミュレーションACP(low,up)実測:-38.8dB,-44.4dBSIM :-39.3dB,-45.7dBデジタルプリディストーション技術を用いた広帯域低歪増幅器5図 17.スペクトラム(歪補償あり)4.6.1 項と同様,高い精度で増幅器特性をモデル化できていることが分かる図 14,図 16 から2 つの増幅器の歪特性がほぼ同じであるにも関わらず,図 15,図 17 の歪補償ありではACPで10dB 程度の差が生じ,歪補償の効果に大きな差が生じていることが分かる。振幅,位相特性及び,スペクトラムが同程度の増幅器であっても,DPD の効果に差が生じる興味深い結果であり,動的モデルを用いる性能検証は開発ステップの重要な1つであることが分かる。5. むすび今回,ACP-57.1dB,歪補償量17.3dB と優れた性能を実現し,様々なシステムに対応できるDPD 増幅器の開発に成功した。また,増幅器動的モデルの抽出方法を獲得し,DPD性能検証への有効性が確認でき,製品開発に際しての重要なノウハウを蓄積することができた。今後は,更なる高効率化を目指し,DPD 処理の軽量化,周辺回路の低消費電力化,ドハティー増幅器などの高効率増幅器への適用などに取り組む予定である。また,実製品開発として,業務用無線機への適用に向けての検討を行う予定である。謝 辞本DPD 歪補償増幅器の開発にあたり,ご指導賜った三菱電機(株)情報技術総合研究所マイクロ技術部の皆様に,深く感謝の意を表する。商 標MATLAB,Simulink は,米国The Math Works.Inc .の米国及び,その他の国における商標又は登録商標である。Quartus は,米国及び,又はその他の国におけるIntel Corporation 又はその子会社の商標である。参考文献土谷和之:フィードフォワード歪補償を用いた高効率,広帯域増幅器の開発,MMS 技報Vol27,9~14(2020)執 筆 者 紹 介土谷 和之(つちや かずゆき)1993 年入社。無線通信システムに関するハードウエア開発に従事。現在,第4事業部に所属。-90-80-70-60-50-40-30-20-10010-15 -10 -5 0 5 10 15レベル(dBm)周波数(MHz)※400MHz基準歪補償あり実測値シミュレーションACP(low,up)実測:-48.1dB,-49.7dBSIM :-51.3dB,-52.4dB