2025年度 三菱電機ソフトウエア技術レポート
ひまわり8・9号の赤外画像に生じた走査鏡の角度に依存する放射輝度誤差の補正に関わる技術
1.まえがき
日本の気象観測衛星であるひまわり8号・9号は、東経140.7度の静止軌道上から地球を観測し続け、日本や周辺諸国の生活の安全を守るために非常に重要な役割を担っている。ひまわり8号・9号は海洋や砂漠、山岳地帯、雲や水蒸気、海氷等を観測することができ、大気や海洋などの地球全体の気象観測、気候の監視に大きく役立つ衛星である。ひまわり8号・9号は可視と近赤外、赤外の波長帯を観測できる光学センサを搭載している。本稿は、ひまわり8号・9号の光学センサで確認された校正異常の影響により観測画像に生じた放射輝度誤差を低減するために当社で考案した手法[1](以降、考案手法と呼称する。)について、紹介するものである。
1.1ひまわり8号・9号可視赤外放射計の概要
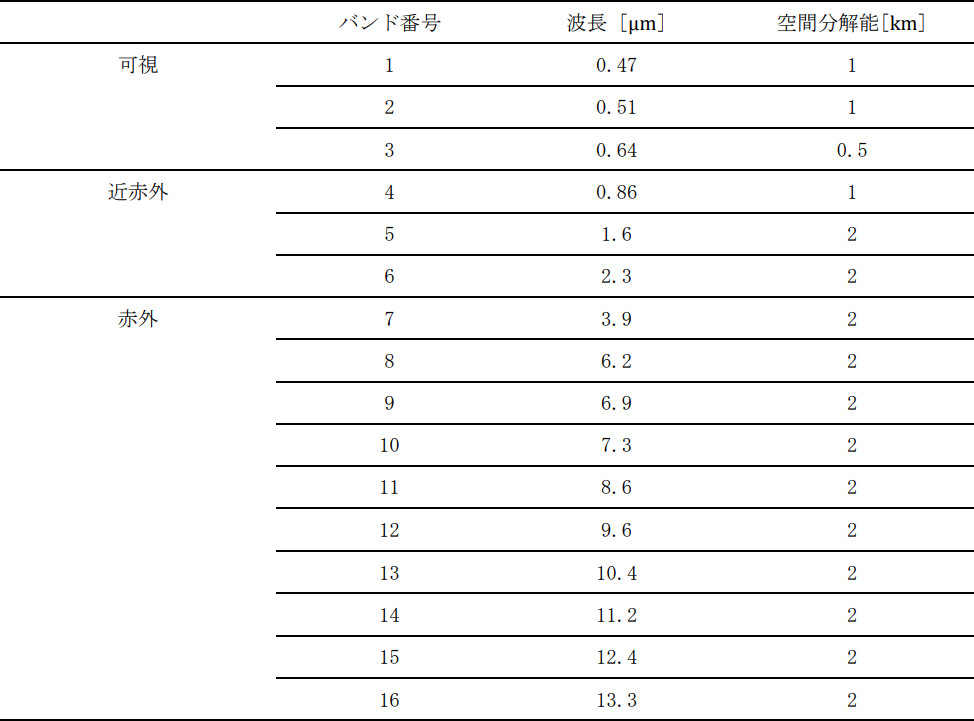
ひまわり8号は2014年10月7日に打ち上げられ、その後2015年7月7日に運用を開始した[2]。ひまわり9号は2016年11月2日に打ち上げられた後、ひまわり8号のバックアップ衛星として待機運用を開始した。ひまわり8号は2022年12月13日に待機衛星に移行し、同日からひまわり9号が運用衛星としてひまわり8号の観測ミッションを引き継いだ[3]。ひまわり8号・9号はAdvanced Himawari Imager (AHI)と呼ばれる可視赤外放射計を搭載している。AHIは16バンドの波長帯を観測し、前身衛星である運輸多目的衛星(MTSAT)シリーズの2倍の空間解像度を備えている[4,5]。各バンドの特性を表1に示す。AHIはGeostationary Operational Environmental Satellite(GOES)-16(アメリカ合衆国の静止環境観測衛星)に搭載されている可視赤外放射計(Advanced Baseline Imager (ABI))と同シリーズである[5-7]。
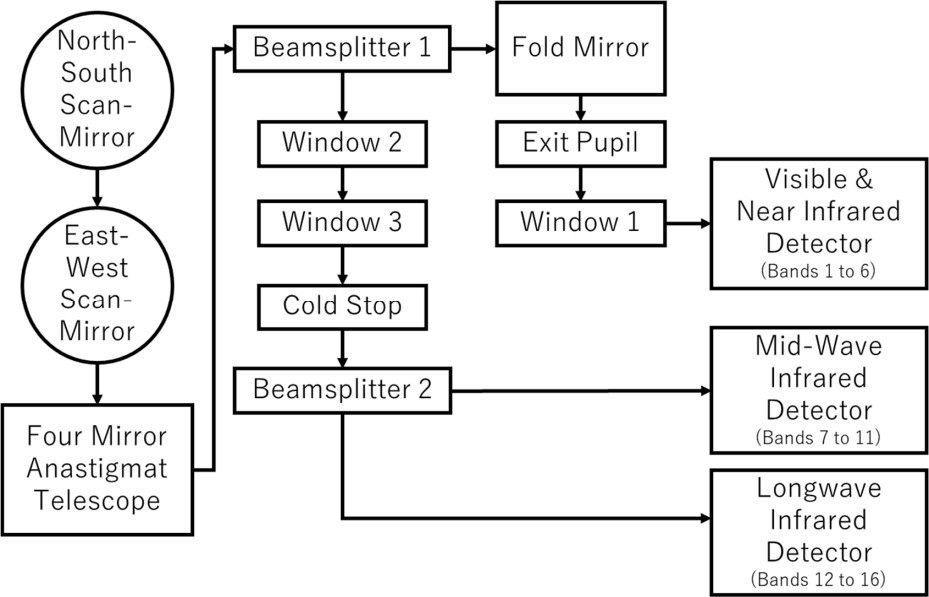
図1にAHI光学システムと光路の概要を示す。AHIは南北走査鏡(North-South Scan-Mirror)と東西走査鏡(East-West Scan-Mirror)と呼ばれる二つの走査鏡を搭載している。各走査鏡は独立した一つの回転軸をもつ。AHIは二つの走査鏡を駆動させることで、地球全体を観測する全球観測のほかに日本列島及びその周辺の領域などの観測を併せて10分ごとに繰り返し行うことが可能である[8]。ひまわり7号は一枚の走査鏡によって観測を行う放射計を搭載していたが、ひまわり8号・9号の放射計であるAHIは、二つの独立した走査鏡を使用する。これにより、素早く、柔軟な観測を行うことが可能になる。AHIの二つの独立した走査鏡を用いた観測は、像を回転させずに赤道に対して平行に走査する。このような観測は偏光を原理的に補正する。天底では南北走査鏡からの反射によって導かれた偏光が東西走査鏡からの反射によって打ち消される。これは反天底に配置された内部校正ターゲットである黒体に対しても同様である。このような高度な観測装置の潜在能力を最大限に活用するには、高精度の放射測定校正が不可欠である。
1.2全球画像平均輝度温度の変動
ひまわり8号・9号は10分ごとに全16バンドの全球観測データを配信する。表1に示すようにAHIは可視領域では3バンド、近赤外領域では3バンド、赤外領域については10バンドの帯域を観測する。特に赤外バンドは海面温度などの観測にも貢献している[9]。
一方で、ひまわり8号赤外バンドに関して、夜間に全球画像平均輝度温度が不連続に変化する事象が確認された。図2に示すようにこの事象はひまわり9号でも発生した。全球画像平均輝度温度の不連続な変化は、開口への太陽光入射を回避する目的でスペースルック(深宇宙観測)の位置を東西で切り替えるときに生じていた。地球画像は、東西方向の走査で得られる全球スワス画像を南北方向に23枚、地球を覆うように取得し、合成して生成する。ここで、スワスとはAHIの一度の走査によって取得される観測エリアの単位のことである。スペースルックデータはセンサオフセットの計算に使用され、各全球スワスとともに取得される。スペースルックの視線方向を東西で切り替える理由は、太陽が地球のエッジ外側付近に位置した際に太陽光が検出器に入射することを防ぐためである。全球画像平均輝度温度が不連続に変化した原因としては、走査鏡赤外放射率(Scan-Mirror Emissivity (SME))の真値と、地上試験結果をもとに推定され、放射輝度推定モデル(ラジオメトリックモデル)に適用しているSME値との間に乖離が生じていることが考えられる。
AHI-8/9はそれぞれひまわり8号・9号に搭載された可視赤外放射計。
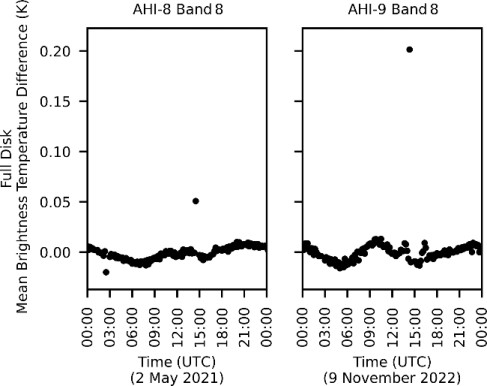
10分ごとに取得された全球画像についてその10分前の全球画像との平均輝度温度差を示す。AHI-9では、日中のスペースルック視線方向の東西切り替えをハウスキーピングオペレーションのタイムラインで実施しており、このタイムラインでは全球観測を行っていないため、AHI-9の日中における全球画像平均輝度温度差の不連続な変化はプロットされていない。
1.3走査鏡入射角に依存する走査鏡赤外放射輝度
ひまわり8号・9号が観測した地球周辺のスペースルックデータを分析した結果、深宇宙の赤外放射輝度は走査鏡の角度(入射角)変化に応じて変化していることが明らかになった。この現象はGOES-8[10]やGOES-10[11]でも報告されている。これはSMEの角度依存性の影響によるものである。SMEが走査鏡角度に依存して変化する要因は走査鏡表面に施されたコーティングの赤外線吸収機能によるものである。
AHIは南北走査鏡と東西走査鏡の二枚の走査鏡を駆動させて観測を行うため、二枚の走査鏡それぞれのSME誤差が赤外画像の放射輝度誤差の要因となる。そのため、南北方向と東西方向の両方について放射輝度誤差の分布が生じることに注意する必要がある。図3は、このようなSME誤差に起因する放射輝度誤差の影響を理解するための助けとして、その影響を視覚的に表したものである。
AHIと同様のスキャナシステムをもつGOES-16/ABIに対しては、このSMEの角度依存性の影響による放射輝度誤差を補正するために、打ち上げ後に新たなSME関数の係数データセット(ルックアップテーブル)が提供された[11]。しかしながら、このルックアップテーブルを得るための具体的な手法や確立された手法については言及されていない。また、同一光路上に二枚の1軸走査鏡をもつ撮像装置に対してそれぞれの走査鏡のSMEを算出するための確立された手法は提案されていなかった。
当社では、光学系の同一光路上における二枚の1軸走査鏡それぞれに対して、一つの放射輝度推定モデルと軌道上の観測データセットを使用してSMEを推定する方法を確立した。以降で、AHIの赤外放射輝度推定モデルについて述べた後、考案手法について述べる。この技術を用いて推定された新たなSMEは、2022年8月12日、初めてひまわり9号地上システムの校正処理に実装された。それ以降に生成されたAHI-9画像は、この地上システムによって処理され、ユーザに配信されている。
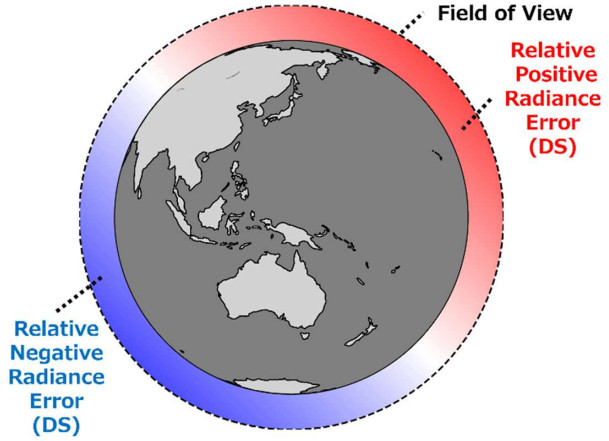
この図は、走査鏡の放射率誤差によって生じる赤外放射輝度誤差の分布を視覚的に表現したものである。実際の赤外放射輝度誤差分布はハードウェア固有のものであり、この図に示されている分布と必ずしも一致しない。また、この図はAHIの性能を示すものではない。DS: Deep Space.
2.赤外放射輝度推定モデル
AHI赤外バンドの放射輝度推定モデルは、次の式(1)で表される[12,13]。

ここで、ROBは観測対象の赤外放射輝度値、RDは検出器へ入射する赤外線の放射輝度値を表す。REW(TEW)とRNS(TNS)はそれぞれ東西走査鏡と南北走査鏡の黒体放射輝度を表し、それらの値は自身の絶対温度TEWとTNSにそれぞれ依存する。ρEW(θEW)とρNS(θNS)はそれぞれ東西走査鏡と南北走査鏡の赤外反射率を表し、それらの値は自身への赤外線入射角θEWとθNSにそれぞれ依存する。εEW(θEW)とεNS(θNS)はそれぞれ東西走査鏡と南北走査鏡の赤外放射率を表し、それらの値は自身への赤外線入射角θEWとθNSにそれぞれ依存する。放射輝度推定モデル(式(1))では、赤外放射率及び赤外反射率は、次のように2次式で表される。

本稿において記号「≔」は、左辺を右辺で定義することを意味する。
3.走査鏡の角度に依存する放射輝度誤差の補正技術
3.1提案手法
当社では、二枚の1軸走査鏡を搭載した放射計に対して、軌道上の観測データを利用して走査鏡赤外放射率を推定する技術を開発した。この技術では、深宇宙領域観測データとAHI校正データを入力データとして扱い、走査鏡赤外放射率を推定する。具体的には、図4に示すように地球周辺の深宇宙領域を観測し、二点の領域組を決定する。
例えば、深宇宙領域iとjについて考え、この二点間について、検出器の観測放射輝度差ΔR(D,(i,j))と検出器への入力放射輝度差ΔR(M,(i,j))をそれぞれ算出し、さらにこれらの差分データEk≔ΔR(D,(i,j))-ΔR(M,(i,j))を定義する。kは領域組(i,j)の識別番号である。多くの領域組データを取得することが、走査鏡赤外放射率を推定するための鍵となる。
3.2走査鏡赤外放射率関数の最適化
観測差分データEkのデータセットを入力とする走査鏡赤外放射率を推定するための目的関数fを設計し、そのfを最適化することを考える。fのパラメータは式(2)と式(3)の係数であり、x≔(a0,a1,a2,b0,b1,b2)tとなる。ここでxtはベクトルxの転置を意味する。目的関数fの設計例は参考文献[1]を参照されたい。
検出器の観測放射輝度差と検出器への入力放射輝度差との差分データEkが入力データとして与えられ、かつ、放射輝度推定モデルには式(1)の関係が成り立つことから、目的関数fは複雑な非線形式として表される。非線形な目的関数に対する最適化には、共分散行列適応進化戦略(Covariance Matrix Adaptation- Evolution Strategy (CMA-ES)[14-16])と呼ばれる手法が提案されている。CMA-ESは非線形関数の最適化に対して非常に有効な手法の一つである。今回、走査鏡赤外放射率を推定するための方法としてCMA-ESを導入した。次の節でCMA-ESの特徴を紹介する。
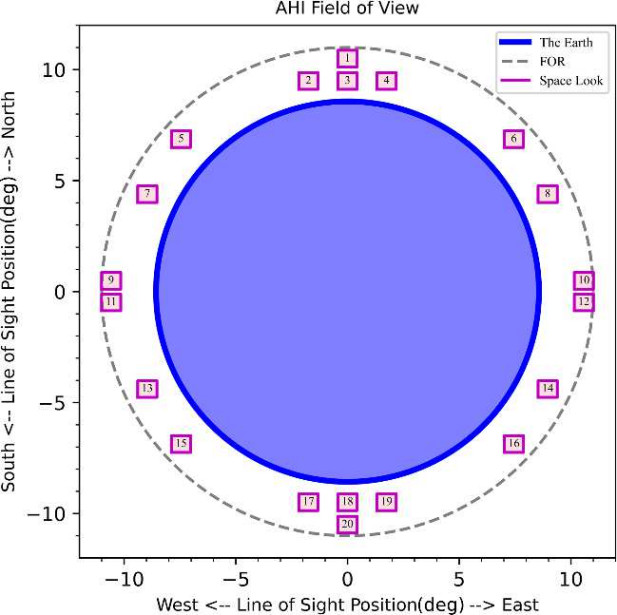
FOR: Field of Regard。Space Lookの番号はスワス番号。原点(0,0)は天底。
3.3CMA-ES
CMA-ESは、連続最適化問題を解決するためのアルゴリズムであり、進化計算の枠組みにおける進化戦略(Evolution Strategy (ES))と呼ばれるアルゴリズムの一つである。本節では、CMA-ESの一つである(μ/μw,λ)-CMA-ESについて紹介する。以降でCMA-ESは(μ/μw,λ)-CMA-ESのことを指すものとする。
CMA-ESは、目的関数f : ℝd → ℝの最適解を見つけるために使用されるアルゴリズムである。ここで、ℝは実数の集合、ℝdは次元dのベクトルの集合を表す。このアルゴリズムは確率的であり、ノイズに対してロバストな性質を持つ。また、目的関数の微分を必要としない点が特徴である。
ESは、確率分布を用いて候補解を生成する。CMA-ESは、ESにおける確率分布として多変量正規分布を使用する。CMA-ESは、多変量正規分布から候補点を生成し、それらの適合度を評価する。次に、サンプリングされた点とその適合度の情報を用いて、多変量正規分布の平均ベクトルと共分散行列を更新する。CMA-ESはこのプロセスを繰り返すことで最適解を求めることができる。CMA-ESのアルゴリズムの詳細は参考文献[14-16]を参照されたい。参考文献[1]でもその概要を示している。
4.補正技術の効果
走査鏡赤外放射率を推定する考案手法の効果検証は、ひまわり9号の軌道上の観測データを用いて実施した。図5はひまわり9号の全球画像平均輝度温度差の推移を示す。スペースルックの観測位置を東西で切り替えるときに生じていた全球画像平均輝度温度差の不連続な変化は、放射輝度推定モデルに適用されていた各走査鏡のSMEを考案手法にて算出した各SMEに更新することで、低減していることが確認できる。この結果は、考案手法が角度依存性を伴うSMEの最適化を実現することに貢献していることを示す。
図6は、図4に示すような地球エッジ周辺の深宇宙領域を観測した際の画像について、地上試験の結果から算出したSMEと考案手法にて算出したSMEそれぞれを使用して算出した場合における放射輝度値の日平均を示したものである。
図7は、図6で示された各バンドの深宇宙放射輝度の標準偏差を示したものである。考案手法にて算出したSMEに更新することで、すべての赤外バンドにおいて、放射輝度誤差だけでなくスワス間の放射輝度変動もまた低減していることが確認できる。
図8は日中と夜間、24時間を通しての平均輝度温度バイアスの推移の一例である。加えて表2に、日中と夜間の平均輝度温度差をSMEの更新有無それぞれに対して示している。これらの結果は、考案手法によって生成された新しいSMEを用いることで、適用後の昼間と夜間における赤外放射輝度誤差の変動が改善されることを示している。
この手法では、同一光路上の2つの走査鏡と検出器を一つのシステムとして扱っている。また、南北及び東西走査鏡のSME関数は、いずれも同じ校正モデルに基づいて算出されている。
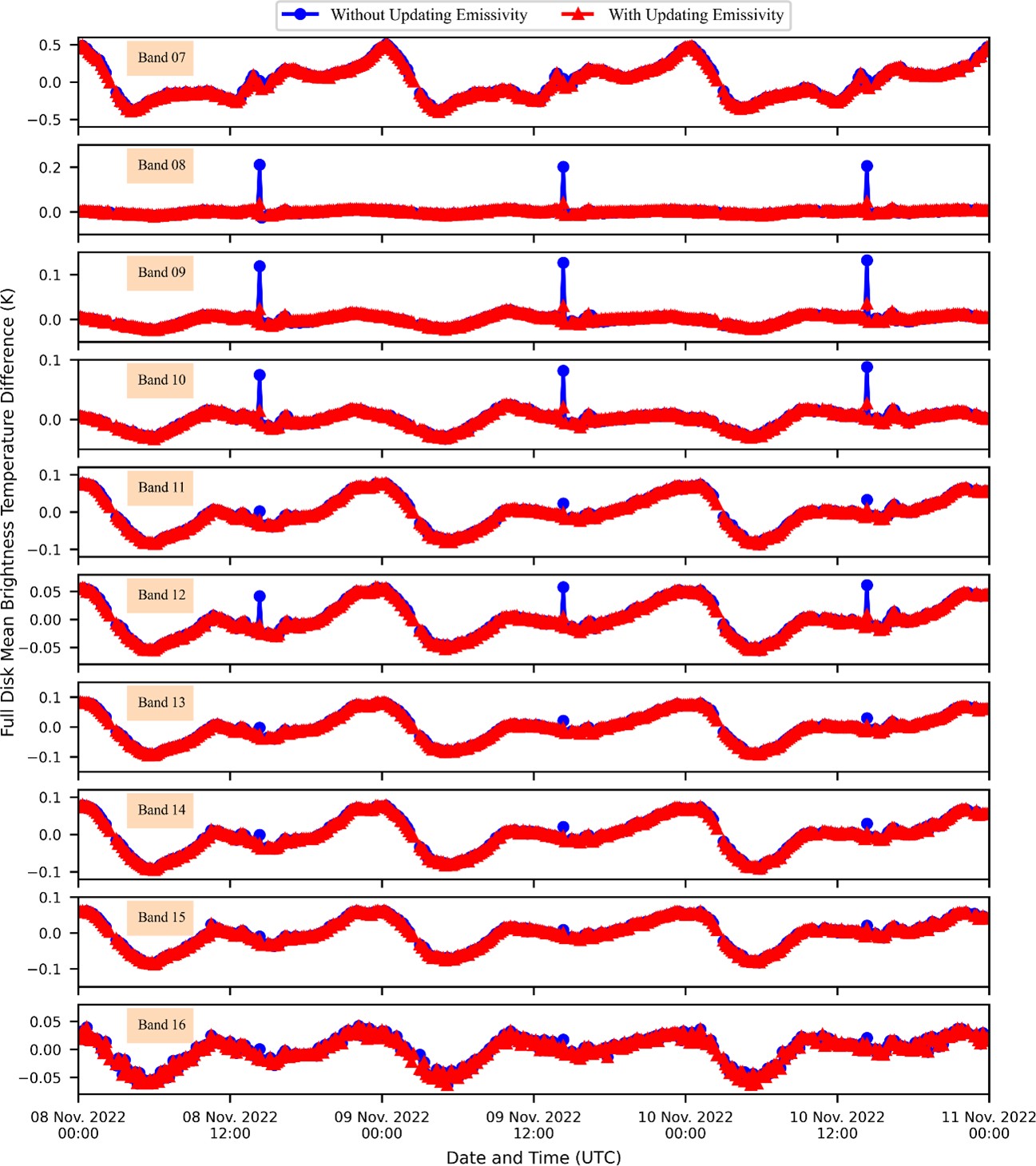
10分ごとに得られる全球画像について直前に得られた全球画像との平均輝度温度差を示す。 “Without Updating Emissivity”は各SMEの更新を行っていないケース、“With Updating Emissivity”は各SMEの更新を行ったケースを示す。AHI-9は、日中のスペースルック視線方向切り替えを行う観測タイムラインにてハウスキーピング運用を行うため、全球観測を行っていない。そのため、日中のスペースルック切り替え時の全球画像平均輝度温度差データはプロットされていない。
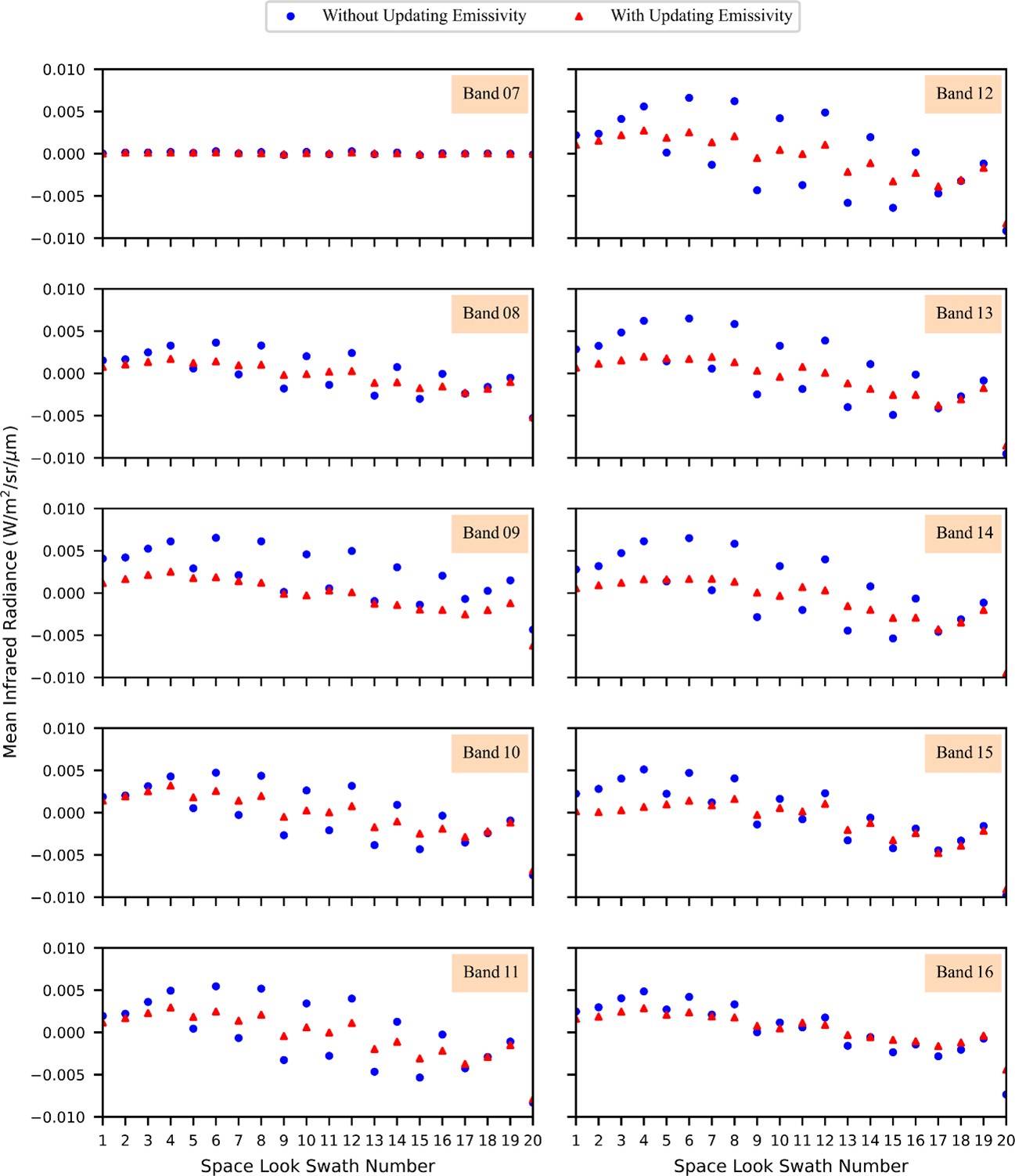
SME更新有無と深宇宙平均放射輝度の算出例を示す。観測データは2022年11月10日のものである。平均放射輝度が0未満のものは校正異常ではなく、センサオフセット処理の影響によるものである。“Space Look Swath Number”は、図4のスワス番号に対応する。
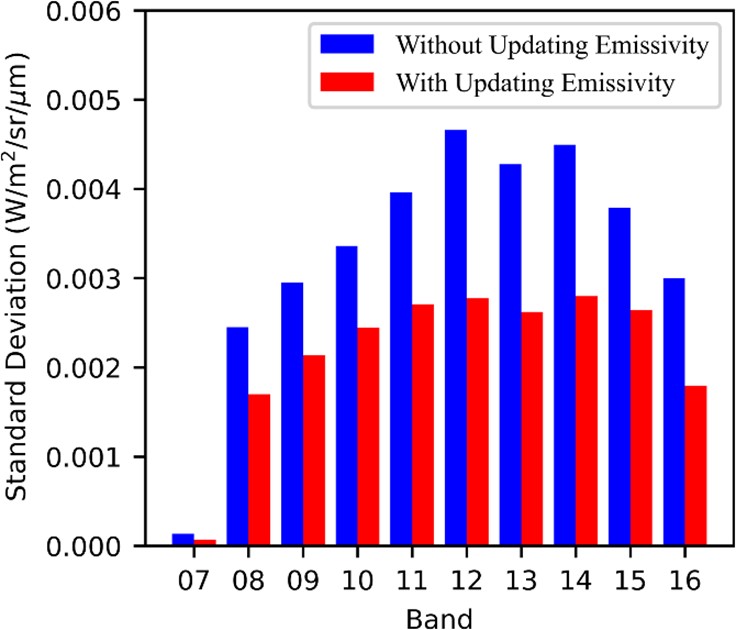
観測データは2022年11月10日のものである。“Without Updating Emissivity”は各SMEの更新を行っていないケース、“With Updating Emissivity”は各SMEの更新を行ったケースを示す。
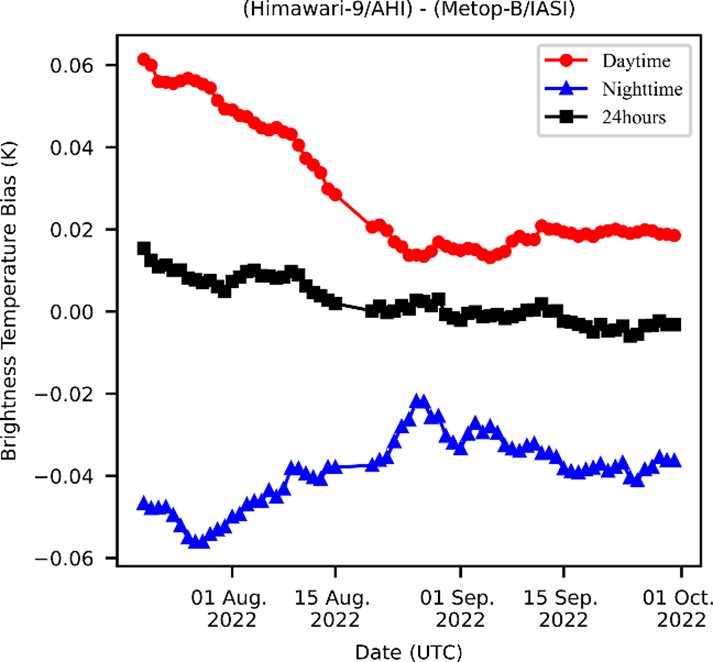
AHI-9のBand9(6.9[μm])において、評価基準として使用された海上における晴天時の輝度温度は244.4[K]である。この評価では、Metop-B/IASIとひまわり9号/AHIがほぼ同じ場所をほぼ同時刻に観測したケースから収集されたデータが使用された。トレンドデータは平滑化期間t-14からt+14(tは有効日)を用いて算出されたGSICS再解析補正情報である。評価方法は参考文献[12]に記載されている。AHI-9のSMEは2022年8月12日に更新された。
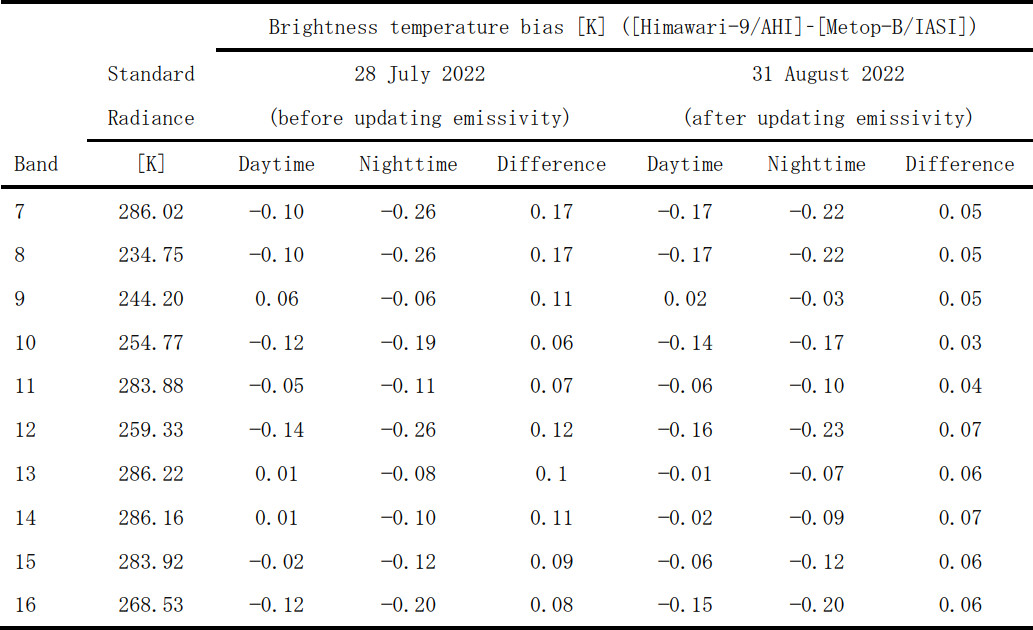
表中の“Difference”は図8で記述されたものと同じ方法で計算された”Daytime”と”Nighttime”の差の絶対値を示す。
5.むすび
本稿では、当社が考案した、放射計における角度依存性を伴うSMEを軌道上の観測データを用いて推定する技術について紹介した。
考案手法は、深宇宙領域観測データを用いて、南北走査鏡と東西走査鏡の両方に対して各SME関数の新しいパラメータを生成する。評価結果では、これらの新しいパラメータが角度依存性のある放射輝度誤差を低減した。真値から乖離したSMEは、走査鏡の角度に依存する赤外放射輝度誤差だけでなく、昼夜間の輝度温度バイアスの変動増加も引き起こす原因となる。このバイアス変動は各走査鏡の温度に依存する。これは、各SMEが走査鏡の赤外放射輝度を計算するために使用され、その計算結果が式(1)に示すように各走査鏡の温度に依存するためである。考案手法を使用して得られたSMEは輝度温度バイアスの変動も低減させた。これらの結果は、考案手法が軌道上観測データを用いて二枚の1軸走査鏡における各SMEの最適化を実現したことを示している。
考案手法は、角度依存性のある放射輝度誤差の低減だけでなく、輝度温度バイアスの昼夜の変動を低減することにも貢献する。また、同一の放射輝度推定モデルから二枚の走査鏡それぞれに対する赤外放射率関数パラメータを生成することができる。つまり、この手法は一つのシステムに対して両方のSME関数を同時に最適化する。考案手法では、最適化プロセスにCMA-ESを導入している。CMA-ESは、非線形多変数関数の最適化問題を解決する上で非常に有効であった。角度依存性を伴うSMEを最適化するには、既知の赤外放射輝度と、異なる走査鏡角度を持つ複数の領域組の観測データが必要である。地球の視野内に既知の赤外放射輝度を持つ領域がない場合でも、考案手法は深宇宙領域観測データを入力することで、角度依存性を伴うSMEを最適化することが可能である。地球観測を主なミッションとする衛星は、地球(全球)上で既知の赤外放射輝度と、異なる走査鏡角度を持つ複数の領域組を観測することが、運用上の制約により多くの場合で難しい。考案手法は地球(全球)周辺の深宇宙領域観測データを使用するため、地球上の校正ターゲットを使用する必要がないという利点がある。考案手法は、ひまわり9号/AHIの画像品質の向上に貢献した。
今後は、走査鏡を搭載したさまざまな赤外観測機器へ適用の範囲を拡張していきたい。
謝辞
この取り組みは気象庁及び気象衛星センター、三菱電機株式会社のご協力のもと実施されました。ご協力いただいたすべての皆様に心より感謝申し上げます。特に、気象衛星センターの住田氏、内木氏、気象庁の奥山氏には、ひまわり8号・9号のAHIデータの提供や建設的な議論を通してご支援いただきました。三菱電機株式会社の赤木氏には、光学センサ評価に関する貴重な助言をいただきました。
また、この取り組みの一部は気象庁のひまわり8号・9号保守契約の枠組みの中で行われました。
参考文献
- [1]T. Kunimune and S. Akagi, "Scan-mirror emissivity calibration for imager’s two-mirror scanner with covariance matrix adaptation-evolution strategy," J. Appl. Rem. Sens. 19(2) 024503 (2025).
- [2]A. Okuyama et al., “Preliminary validation of Himawari-8/AHI navigation and calibration,” Proc. SPIE 9607, 96072E (2015).
- [3]M. Sumita et al., “Pre-operational validation of AHI on Himawari-9, in navigation and calibration,” in The 12th Asia Oceania Meteorol. Satellite Users’ Conf. (AOMSUC-12) (2022).
- [4]K. Bessho et al., “An introduction to Himawari-8/9- Japan’s new-generation geostationary meteorological satellites,” J. Meteor. Soc. Jpn., Ser. II 94(2), 151-183 (2016).
- [5]P. C. Griffith, “Advanced Himawari Imager (AHI) design and operational flexibility,” in The Sixth Asia/Oceania Meteorol. Satellite Users’ Conf. (AOMSUC-6), (2015).
- [6]T. J. Schmit et al., “Introducing the next-generation Advanced Baseline Imager on GOES-R,” Bull. Amer. Meteor. Soc. 86, 1079-1096 (2005).
- [7]T. J. Schmit et al., “The GOES-R Advanced Baseline Imager and the continuation of current sounder prod ucts,” J. Appl. Meteor. Climatol. 47, 2696-2711 (2008).
- [8]T. Tabata et al., “Himawari-8/AHI latest performance of navigation and calibration,” Proc. SPIE 9881, 98812J (2016).
- [9]A. G. O’Carroll et al., “Observational needs of sea surface temperature,” Front. Mar. Sci. 6, 420 (2019).
- [10]D. Han and M. P. Weinreb, “Trends and diurnal cycles of GOES imager scan-mirror emissivity,” Proc. SPIE 4135, 354-363 (2000).
- [11]F. Yuet al., “Validations of GOES-16 ABI infrared spatial response uniformity,” Proc. SPIE 10764, 107640F (2018).
- [12]A. Okuyama et al., “Validation of Himawari-8/AHI radiometric calibration based on two years of in-orbit data,” J. Meteorol. Soc. Jpn. 96B,91-109 (2018).
- [13]R. Dalta et al., “Comparison of the calibration algorithms and SI traceability of MODIS, VIIRS, GOES, and GOES-R ABI sensors,” Remote Sens. 8(2), 126 (2016).
- [14]N. Hansen and A. Ostermeier, “Adapting arbitrary normal mutation distributions in evolution strategies: the covariance matrix adaptation,” in Proc. IEEE Int. Conf. Evolutionary Comput., pp. 312-317 (1996).
- [15]N. Hansen and A. Auger, Theory and Principled Methods for the Design of Metaheuristics, 1st ed., pp. 145 180, Springer Berlin Heidelberg, Berlin (2014).
- [16]N. Hansen, “The CMA evolution strategy: a tutorial,” arXiv.1604.00772 (2016).