2025年度 三菱電機ソフトウエア技術レポート
(コラム)
ATO(自動列車運転装置)により運転士の負担軽減とともに乗客の乗り心地向上を実現
ATO(自動列車運転装置)の開発
進化する鉄道自動運転とATOの社会的要請
ATOは、駅の出発から次駅到着まで、運転士に代わって列車の運転操作を自動で行う制御装置です。MESWは、三菱電機株式会社(三菱電機)から開発を受託し、ソフトウェア開発とシステム設計の一部を担当しています。
ATOは数十年にわたって発展してきましたが、近年その重要性が格段に高まっています。社会インフラ事業統括部 伊丹事業所 車両制御システム部 保安制御システム第1課 グループリーダーの堀川拓也氏は「ホームドアの設置が進むと、駅での安定した停止精度が求められるようになり、運転士の負担軽減のために、ATOの導入が進んでいます」と背景を説明します。
また、堀川氏は「運転士や駅員の人手不足の解消、コスト削減のために自動運転技術の導入が進んでいますが、完全な無人化には前方監視等の様々な課題があり、現在その課題解決に向けて検討を行っている段階です」と現状の課題も説明します。
複雑な走行パターン制御と乗り心地向上への挑戦
ATOの走行パターンを分解してみると、「起動・加速」「定速」「定点停止」という3つの主要フェーズに分けられ、それぞれに異なる制御要件があります。(図1)
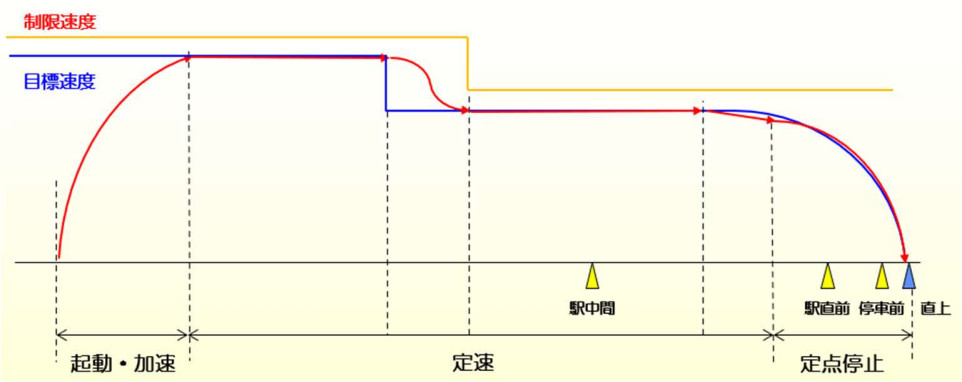
堀川氏は「起動・加速フェーズでは、まず安全な起動条件の確認が重要です。路面状態によっては、上り坂での起動において列車が後退しないようにする制御も行っています」と説明します。加速時は最大ノッチで目標速度に向かいます(ノッチとは、出力の強さの段階のこと)。加速から定速への移行時には加減速度のフィードバック制御により滑らかな速度変化を実現しています。
「定速フェーズでは乗り心地とエネルギー効率の向上が最重要課題となります。列車は風の抵抗を受けたり、勾配によって加速したり減速したりしますので、それに合わせて力行(りっこう:加速)やブレーキの操作をして加減速を調整します。頻繁にノッチが変動してしまうと乗り心地が悪くなるので、なるべくノッチの変動を少なくしながら目標速度に追随するような制御を行います。また、エネルギー消費が少ない惰行(力行やブレーキも使わない状態)をどれだけ行えるかが、省エネ運転の鍵となります」と説明します。
「定点停止フェーズでは最も高度な制御技術が要求されます。減速時の乗り心地や停止間際の揺り戻し等を考慮しながら、停止位置精度を確保する処理が求められます」と、精密な制御について語ります。
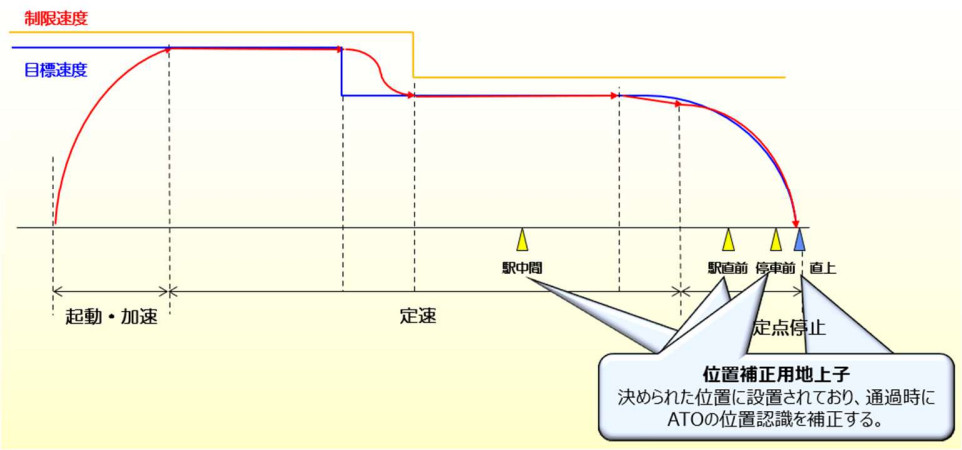
ATOへの入力信号として、車輪回転による速度パルスの重要性は高く、これにより列車の速度と位置を常時監視しています。しかし、車輪径の設定値と実車輪径とのずれや、ブレーキ時の車輪の滑走などで距離測定に誤差が生じるため、位置補正用地上子による位置補正が不可欠です。位置補正用地上子は決められた位置に設置されており、列車が位置補正用地上子を通過する際に、ATOは位置補正用地上子から位置情報を受信し、ATOが認識している位置情報を補正します。(図2)
エキスパートシステムの課題をモデルベース制御の導入で解決
従来システムはエキスパートシステムと呼ばれる手法で、運転士の運転技術をロジックに落とし込んでコンピュータで実現する仕組みでした。しかし、調整パラメータが多く、実車による走行試験を行いながらパラメータ調整を繰り返す必要があり、パラメータ調整時間の短縮が課題でした。
堀川氏は「この課題を解決するため、三菱電機とMESWで、新たなアプローチを導入しました。モデルベース制御を用い、予測制御や路線データベースを活用した実車モデルでダイナミックに演算処理を行うことで、従来の静的なパラメータ依存部を減らし、乗り心地を改善するよう進めています」と説明します。CPUの演算精度と処理速度の向上により、複雑な演算による様々な制御改善が実現可能になったことが背景にあります。
特に定点停止制御では全面的な見直しを実施しています。モデルベース制御を使った新しいアプローチでは、停止目標速度に速度を追従させる仕組みをモデル化し(PC上および実機ハードウェアを用いて)シミュレーションと検証を繰り返すことで乗り心地改善を実現。従来の定点停止制御と比較して、ノッチの変動回数を大幅に削減しながらも停止精度を確保する制御ロジックとなっています。
グループメンバーとの連携による技術的優位性
社会を支える使命が魅力
開発工程では、三菱電機の製作所内でソフトウェアを組み込んだ装置や周辺機器を使用した試験、性能検証を経て、実際の列車での試験走行を行います。製作所内の検証では、 ATOを搭載する列車の走行を再現するシミュレータを用いて、実路線の勾配などを模擬することにより、制御ロジックの正確性を確認しています。
MESWの強みは、長年蓄積したATOに関する技術・ノウハウをベースにして、三菱電機とともにお客様の要望を正しく理解し、ソフトウェアの観点から機能を提案できることにあります。堀川氏は「MESWは三菱電機とともに、お客様の要望を着実に実現しています」と強調します。
MESWのATO開発グループの技術的強みは、仕様意図の読解力にあります。堀川氏は「ATOでは、大きな列車を力行とブレーキで動かすため、物理学や数学に基づいた数式が仕様書に示されます。数式への本質的な理解と実装するアイデアがなくては、処理速度の効率化と精度を両立させたソフトウェアを組むことができません。それらの知識に長けたメンバーがいることが私たちのグループの強みです」と説明します。
将来の完全無人化に向けて技術的課題はまだ山積していますが、堀川氏は「これをエンジニアとしての成長機会と捉えています。列車を制御するようなソフトウェアを開発できる機会は限られています。モデルベース制御の経験や更なる性能向上に対応するための新しい技術基盤の構築など、エンジニアとしてのキャリア形成において豊富な学習機会が得られています」と、技術的挑戦の価値を強調します。
駅のホームドアはバリアフリー対応という社会的要請であり、ワンマン運転・無人化は深刻な労働力不足の解決策として、また省エネルギー化は環境問題への対応として重要な役割を担っています。ATO技術開発の社会的意義について、堀川氏は「我々が技術開発で取り組んでいることが、エンジニア個人の成長だけでなく、社会的な課題解決にも貢献できている点に、大きな責任とやりがいを感じています」と語ります。
今後の展望として、堀川氏は「この先数年間は無人化という大方針に向けていろいろと取り組んでいく計画です。ソフトウェアの立場や役割を少し超えたところまでカバーして、高度な要望に応える体制作りをしていきたいと思っています」と語ります。