2025年度 三菱電機ソフトウエア技術レポート
(コラム)
装置を可視化するツール機能と安全性を高める機能で使いやすい次世代搬送システムを実現
三菱電機リニアトラックシステムMTR-Sシリーズの開発
国内初の曲線搬送ルートに対応
ケーブルを無くすことでキャリアを自由に制御
リニアトラックシステムは、磁力を利用した搬送台(キャリア)をレール上で個別に制御しながら高速・高精度に動かす次世代の搬送システムです。従来のコンベアシステムとは異なり、個々のキャリアを独立して制御できるため、柔軟な搬送ルートの構築や、搬送しながらの組み立て作業など、高度な自動化・柔軟な生産方式を実現します。2025年4月、三菱電機は国内で初めて曲線のある搬送ルートにも対応できるリニアトラックシステムMTR-Sシリーズの出荷を開始しました。
FA・ファシリティ事業統括部 名古屋事業所 MDエンベデッド開発部 ドライブソリューション技術課 課長の名取裕子氏は、リニアトラックシステムの原理を次のように述べます。
「既存のリニアモータは直線形状のレールに磁石を、キャリアにモータコイルを搭載し、モータコイルに電流を流すためのケーブルが必要でした。逆に、リニアトラックシステムはレールにモータコイルを、キャリアに磁石を搭載することで、キャリアのケーブルを不要としました。この結果、ケーブルがキャリアの駆動を妨げることがなくなり、個々のキャリアの位置、速度を自由に制御できるようになりました。また、様々な形状のレールと組み合わせることにより多様な搬送形状にも対応できます」
リニアトラックシステムMTR-Sシリーズの
構想段階からMESWが参画
従来のベルトコンベアでは同一速度で同一方向に加工物(ワーク)が搬送され、ベルトコンベアの速度に合わせた加工が必要でした。一方、リニアトラックシステムは個々のキャリアの速度を調整できるのみならず、逆方向に搬送させることもできます。
「MTR-Sシリーズのレールやキャリアは剛性を持っているので、加工台などにワークを移動しなくても、ロボットなどを利用してキャリア上で直接加工ができます。そのため加工台の設置を必要とするコンベア搬送に比べて、ワークを加工台に移動する手間と加工台を設置するスペースの両方を削除できます」(名取氏)
リニアトラックシステムMTR-Sシリーズは、工場の生産ラインに高い生産性をもたらす先進的な搬送システムです。食品や半導体をはじめ、様々な業種で導入や導入検討が進んでいます。このMTR-Sシリーズの開発にMESWは製品構想の段階から深く関わり、他開発で培ったサーボシステム制御のベース技術を生かし製品開発に貢献しています。その中で、ここでは、2Dキャリアモニタとキャリア衝突回避機能を紹介します。
装置の可視化でユーザーが設定しやすい
リニアトラック設定ツール・2Dキャリアモニタ
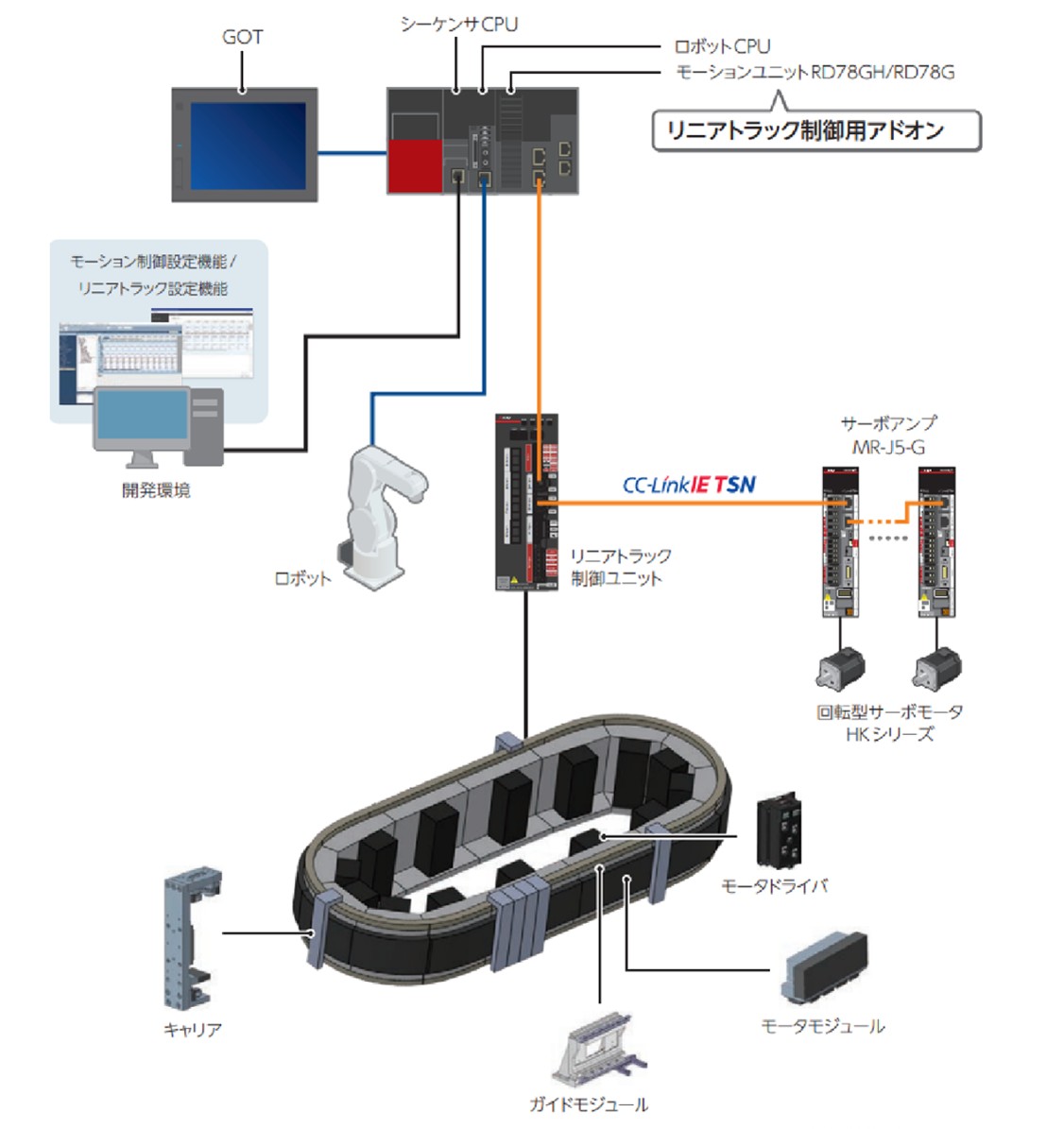
リニアトラックシステムMTR-Sシリーズの開発では、ユーザーの設定のしやすさが重要なポイントになりました。MESWはサーボコントローラ向けに長年培った設定ツール開発の知見を基に、リニアトラック設定ツールを新規開発しました(図1左上の開発環境)。リニアトラック設定ツールは、パソコン上で直線・曲線・真円のパーツを自由に結合してリニアトラックを構成し、その上でキャリア群をどのように動かすかを設定します。設定されたキャリア制御データは、シーケンサ経由でリニアトラック制御ユニットに渡されます。
また、リニアトラックシステムは多くの構成要素からなるシステムなので、実機でシステムを組み上げて稼働する前に動作確認できる2Dキャリアモニタ機能をリニアトラック設定ツールに用意しました。2Dキャリアモニタは、リニアトラックの実機がなくてもパソコン上でキャリア群の動きをシミュレートできます(図2)。
開発時のポイントをドライブソリューション技術課 グループリーダーの伊藤 司氏が語ります。
「レールパーツの長さも決まっていない中で、設定ツールの開発が始まりました。そのため、どのようなレールパーツにも対応できるようなソフトウェアアーキテクチャを設計しました。その結果、途中でパーツ形状が2種から3種へ、1種追加となりましたが、容易に対応することができました」

ユーザーのキャリア設定を自動で安全に
開発者の知見を集めたキャリア衝突回避機能
リニアトラックシステムではキャリア毎に速度を制御できるため、キャリアが衝突する懸念がありました。装置を安全に動作させるためには、ユーザーが各キャリアの動作を踏まえて衝突をしないよう複雑な設定をする必要があります。そこで、衝突を自動で回避する仕組み(キャリア衝突回避機能)を開発しました。キャリア衝突回避機能は、キャリア間の間隔が短くなった時に減速・加速・一時停止を自動的に行い、キャリアが衝突しないようにします。この機能により、ユーザーは衝突を気にすることなくキャリアの動きを簡単に設定できます。
開発時のエピソードをサーボドライブ制御開発課 グループリーダーの木津 優一氏が次のように述べます。
「キャリア衝突回避機能は、シーケンサ用のモーションユニットの技術がベースとなっています。しかし、衝突回避の実現には、モーションユニットだけでなく、サーボドライブなどの様々な製品の知識・技術が必要でした。そこで今回、MESWの関連する多様な製品の技術者を集めて衝突回避実現のための知見を集約しました。特に、リニアトラックシステムは生産ラインの一部として働くため、生産性を落とさず衝突を回避させる点には工夫を要しました。技術者の知見を集約することで、初めて性能の良い衝突回避機能が得られました」
開発における組織の壁を越えた
コミュニケーションの重要性を実感
リニアトラックシステムの開発を通してMESWの開発者が得たことも多くありました。
「同じ会社の中でも、担当している製品のつながる相手のことをあまり知らないということもあります。組織論では、組織の壁を越えた横のつながりが大切とされています。今回の開発で開発者を集めて知見を集約したことは、組織の横串を通した良い試みでした」(名取氏)
「リニアトラックシステムの開発では三菱電機やMESW社内と交渉や調整を今まで以上に密に実施しました。多くの人の意見を聞いて、より良いものを探りながら製品の質を高めることができたと思います。システム開発における、人と人とのコミュニケーションの重要性を改めて実感しました」(伊藤氏)
リニアトラックシステム開発というプロジェクトを通して、MESWでは人と人とのコミュニケーションの重要性を再認識することができました。現時点ではリニアトラックシステムは、国内対応だけですが、今後、海外規格の対応を検討していきます。人と人とのコミュニケーションを大切にしながら、MESWの開発は続きます。
商標について
- ・CC-Linkは三菱電機株式会社の登録商標です。