テクノロジー
技術レポート:アーカイブ
Category:衛星通信システム
モデルベースシステムズエンジニアリングプロセス(V2 Professor®)で進めるシステム開発の効率化
我々は、メカ・エレキ・ソフト複合システム開発の生産性と品質の向上を目的として、理想と考えられるモデルベースシステムズエンジニアリング(MBSE)プロセスを構築し実践している。そのプロセス構築では、設計論に関する科学的背景を踏まえつつ、具体的手順として現場が理解・応用しやすくなるよう努めた。
この体系的な設計手法を「V2
Professor」と称する。
本論文では、V2 Professorに関する仕組みと特徴を紹介する。
参考情報:
- この技術レポートは、当社が展開する宇宙・通信事業の衛星通信システムソリューションに係る技術について著述されたものです。
- 衛星通信システムソリューションは、通信機事業所が提供しています。
1 MSS 技報・Vol.31
モデルベースシステムズエンジニアリングプロセス(V2 Professor Ⓡ)で進めるシステム開発の効率化
Introduction of model‒based systems engineering process(V2 Professor®)that promotes systemdevelopment effi ciently
藤原 啓一*Keiichi Fujiwara
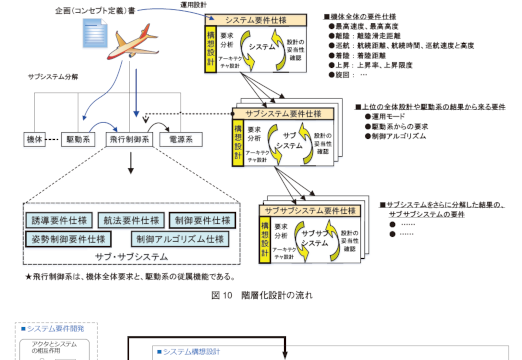
我々は、メカ・エレキ・ソフト複合システム開発の生産性と品質の向上を目的として、理想と考えられるモデルベースシステムズエンジニアリング(MBSE)プロセスを構築し実践している。そのプロセス構築では、設計論に関する科学的背景を踏まえつつ、具体的手順として現場が理解・応用しやすくなるよう努めた。この体系的な設計手法を「V2 Professor」と称する。本論文では、V2 Professor に関する仕組みと特徴を紹介する。
We construct and are practicing the ideal model‒based systems engineering(MBSE)process forthe purpose of improving the productivity and quality of mechanical/electric/software complexsystem development. In the process construction, we tried to make it easier for the site to understandand apply as a concrete procedure, based on the scientifi c background of the design theory.This systematic design method is called “V2 Professor”.This paper introduces the mechanism and features of V2 Professor.
*関西事業部
1.まえがき
MBSE を実践すれば「システムエンジニアリングの設計に関して、今までよりも良くなるはずである」という思いで導入されるケースが増えている。しかし、「良いこと=準自動設計」と勘違いしていたり、MBSE = MBDと考え、自動プログラミングに期待する場面に遭遇することがある。ここでは、MBSE の最大の利点である「モデル粒度で設計を進めることでトレーサビリティが分かりやすくなり、設計品質が向上する」という点に絞り、その理由を説明する。2.システム設計効率化を阻む原理的な壁システム設計には、誰も避けて通れないプロセス上の原理的な壁が存在する。その幾つかを、最初に紹介しておく。2.1 要件仕様と構想設計の絡み問題要件仕様と構想設計は絡み合う。制御系システムでは、情報系システムよりも、更に仕様間の絡みが複雑になる。これは設計における原理的な問題である。制御系システムは、ソフトウェア単独の場合もあるし、メカ・エレキ・ソフト複合システムの場合もあるが、仕様間の絡みが複雑となる問題に変わりはない。仕様は、「要求(実現してほしいこと)を満たすための具体的な振る舞いの記述、手段やパラメータ」であるが、初めて作るシステムは、システムの仕組みに関する知見がないため仕様記述ができない。したがって、一度、設計してみて、作るモノの仕組み(アーキテクチャ)の目途を得てから、仕様を正確に記述するしかない。図1 要件仕様と構想設計の関係性2 MSS 技報・Vol.31設計変更や不具合修正を、どのように各仕様に展開すれば良いのか(影響を考慮しながら修正箇所を探し出せば良いのか)という問題を解決するためには、最初の設計段階で、この仕様の絡み具合(仕様の関係性)を明らかにし、仕様の関係性を考慮した設計プロセス、設計手順を決めておくことが重要となる。2.2 システム全体は部分の和以上である「システムの上位レベルが働くためには、下位のレベルの要素そのものを支配する法則に依存する。しかし、上位のレベルの働きを、下位のレベルの法則によって明らかにすることはできない」(マイケル・ポランニー)。これは、上位のレベルの働きは、下位のレベルの働きの合計とは異なる部分が存在するということである。例えば、自動車の性能は、エンジン等の部品の性能に帰着するが、エンジンやタイヤの設計者を集めるだけでは、良い自動車は設計できない。自動車全体の働きを考えて、下位レベルの部品に性能割り付けができるエンジニアが必要なのである。つまり、縦割り組織のボトムアップ設計では、新規システムの設計は難しいということである。このような問題は、スクラッチ開発が終わり、維持・派生開発を長らく実施した後に、スクラッチ開発を行うと必ずといって良いほど発生する。これは、維持開発段階になると効率化のために部品開発ごとに組織分けが行われ、「システム全体設計者がいない」状態で、創発的要素の多い新規システム開発を行おうとしたとき、システム全体に責任を負い、組織横断的な管理を行う能力のある人材を集めたチームをすぐに準備できないことが原因である。解決手段は一つ、システム設計に責任を持つ統括組織を作ることである。そして、大規模システム開発の場合には、適切な階層化設計プロセスに従って、上位層の適切な部分までを統括組織が責任を持って設計することである。3.なぜ、MBSE は生産性を向上させる能力を持つのか3.1 設計をモデル言語で表現する意義MBSE は、システムズエンジニアリングの成果物をモデルで表現しましょう、と言っているにすぎず、そのベースとなるシステムズエンジニアリングを変えるものではない。これが理解できないと、MBSE を使うと、システムズエンジニアリングが上手くできるようになるといった誤解が生まれる。設計プロセスを背景としたモデル言語は、個々のモデルの中に他のモデルとトレーサビリティを取るべき要素が組み込まれているので、モデル検証でトレーサビリティ確保することを必須作業としてしまえば、モデルが完成された時点でトレーサビリティも確立された状態になっている。この点が「時間があったらトレーサビリティ設計を実施しよう」というようにトレーサビリティマトリクスを使って間接的にトレーサビリティを確保することと生産性において、格段の差を生む部分である。3.2 制御仕様作成効率が上がる制御系システムでは、仕様を表現するパラメータが多くなる。そして、そのパラメータどうしには関係性があり、2.1 節のとおり、作り方の分からない仕様は一度作ってみて、自分の作りたい仕様が定義できるだけの知識を得ておかなければならない。仕様を作成するために行う、これまでの設計手順は図3のようになる。制御仕様の検討制御仕様の検討制御仕様の検討制御仕様の検討制御仕様の検討制御仕様の検討機能性能仕様アウトプット図面、仕様書要求事項 考えの流れ制御仕様の検討制御モデルの作成評価要件最適な制御仕様実際に動かして最適な制御を見極める図2 制御仕様は設計してみて分かる要件 仕様V&V検証実装品調整設計プロセス実装プロセス図3 これまでの設計手順3 MSS 技報・Vol.31この手順の問題は、仮仕様を一旦決めて、その仕様と実装を整合させるために、実装プロセスを何度も繰り返さなければならないことである。また、検証段階で発見される設計ミスもあり、要件レベルからやり直すことも生じる。製造工程に渡せる仕様を決定することが設計の役割なので、プロジェクト全体の生産性向上はいかに早く仕様を決めるかにかかっている。調整要件 モデル 仕様 実装品V&V 検証設計プロセス実装プロセス実機試験図4 モデルベースの設計手順表1 参照アーキテクチャ規格規格説明エンタープライズアーキテクチャ(EA:enterprisearchitecture)EA は、企業のミッション実現を目的として、必要なITシステムを最適に作り上げるために、主として発注者の視点でまとめた開発プロセス規格である(メタ・アーキテクチャ記述ともいう)。アーキテクチャ記述とは、製品のアーキテクチャを決めるためのプロセス規格であり、メタ・アーキテクチャ記述は、各企業固有の要求分析やアーキテクチャ設計のプロセスや手順を決めるための枠組みである。DoDAF(DoDArchitectureFramework)DoDAF は、EA をベースにしながら、DoD(米国国防総省:United States Department of Defense)の戦闘運用及びビジネス運用・プロセスの両方におけるアーキテクチャ記述の開発、表現及び統合を定義した枠組み(フレームワーク)である。IEEE1220–2005IEEE1220 規格(2005 年)は、分析/統合(アナリシス/シンセシス)をどのように行うかを示したシステムズエンジニアリング標準である。ここで定義している分析/統合の考え方は、システム設計の全体プロセス、個別プロセスである企画プロセス、構想設計プロセス、実体設計プロセス(メカ、エレキ)等々、どこにでも当てはめることができる。企画 構想設計システムメカ設計エレキ設計ソフト設計システム統合時間の流れシステム開発プロセスIEEE1220規格適用図5 アーキテクチャ規格のシステム開発プロセスへの適用部分4.『設計プロセス』の設計に利用した参照アーキテクチャ規格V2 Professor を構築するに際して、表1のような、設計プロセスに関係する規格を参考にしている。5.実務で使えるMBSE 言語が必要であるモデル言語であるSysML やUML は、実プロジェクトで表現している設計モデルの要素的表現しか定義されていない。そこで、我々はコンセプト定義からソフトウェア開発までの設計モデルを表現するメタ言語V2Professor を作成した。V2 Professor は厳密な文法を定義することにとらわれず、モデル間のトレーサビリティを確保しやすくすることを目的にしたモデル言語であり、その特徴は、以下のとおりである。(1) “ 開発現場向け” モデル言語の意味いまだ、設計書からの自動コード生成は主流ではなく、人手によるプログラミングに頼っている実態を勘案すると、様々な能力の人が理解し、使える設計モデル言語でなければならない。つまり、厳密ではあるが、それを読み解くのに数学的な技能が必須である形式言語やSysMLを自由に駆使して表現したモデルでは、多くのレビューワーが理解するのに苦労し、総合的には生産性を落とすことになりかねない。そこで、モデル間のトレーサビリティ定義だけを厳密にしたモデル表現(言語)を定義した。(2) メタモデルとしてトレーサビリティを完備している設計プロセスといわれる大雑把な粒度の開発フェーズを決めるだけに留まらず、プロダクトデザインに集中できるように、モデルレベルでの設計手順及びモデル間のトレーサビリティを示している。これを、図4のように、モデルベースの設計手順で行うと、仕様を決めるのに作ってみるという点は変わらないが、作って試すことを、モデル&シミュレーションで行うので、実物を作るよりはコストを安くでき、コンピュータ上で繰り返し検討することが可能となるので試行錯誤が容易となり、工程も短くできる。4 MSS 技報・Vol.31図7 システム設計プロセスの流れ構想設計組織のミッション分析要求分析・要件開発• ミッション、ビジョンの確立• ビジネスゴールの設定ビジネス要求(システムの上位システムとなる業務プロセスを明確にして、その中におけるシステムの範囲を確定させる要求開発ビジネスユースケース)製品企画仮システム構想(設計解の発見)先行技術開発実装設計メカ設計エレキ設計ソフト設計システム構想方針(設計解)決定システム全体の機能・性能を満足するような、各種(メカ、エレキ、ソフト)システムを開発する。システム開発概念設計初期設計実体設計詳細設計6.モデル設計プロセス/モデル作成・ガイドの概要V2 Professor は、設計プロセスごとに適切なモデルを表現するために、モデル設計プロセスやモデル作成ガイド等を用意している。いずれもシステムズエンジニアリング設計知識と実践経験を積んだエンジニア向けのガイドである。モデル作図ガイドは、特定のツール(例:CameoSystems Modeler、Enterprise Architect、Genesys 等)でモデルを作成しようとするとき、ツールに用意されている記法の何をつかって記述すれば良いかを記載(規定)したものである。ほとんどの市販設計ツールには、V2 Professor のようなメタモデルは付随していないので、ほとんどのエンジニアは、何を、どのように使ってモデルを作成すれば良いのか迷い、自己の中で記述法を確立するまでにかなりの時間を要する。組織としての基準がなければ、各自の記述法が同一である保証はなく、レビューに時間を要するばかりか、見た目はトレーサビリティが取れているように見えるモデルであっても、コンピュータ上のモデルデータは、違うトレーサビリティが張られていることになり、検証に多大な時間を要する。以下、モデル設計ガイド、作成ガイドで定義している内容の一部を紹介する。6.1 ミッションからシステム機能要求までのプロセス多くのシステム開発で、適切なシステムユースケースを抽出できない場合、運用フロー作成のプロセスを行うとシステムユースケースを抽出しやすくなる。組込システムといえども、製品コンセプトがあり、完全自動システムでない限り、製品を含めた運用があり(運用フローで表現)、それを明らかにすることで、システムユースケースが発見・定義できる。プロセス設計モデル設計モデル間をつなげる図6 V2 Professor のモデル間トレーサビリティの様子(3) 開発方針(a) インタフェース設計重視(b) 要件仕様とアーキテクチャ設計が分離できない点を許容できるプロセスの採用(c) 要求・要件仕様の記述方法(レトリック)までのルールを完備(d) 機能設計と機能展開の方法を中心に置き、システムの正常系設計と、異常系/安全系設計が分離しないようにする(e) 設計ツールにおいて、V2 Professor を実現できない部分は自作する(例:用語の統一ツール)5.1 モデル言語表現能力範囲V2 Professor の設計表現範囲は、実装設計段階のメカ設計、エレキ設計を除く部分全てである。5 MSS 技報・Vol.316.2 ビジネス要求からシステム要件の導出「あるビジネス要求の運用を表現する運用フローのアクティビティからシステムユースケースを導出する」ことを経験則として設計作業を行ってきている。これは、オントロジー工学の「行為は、機能と手段に分解できる」としていることと同意であり、経験則が間違いではないことを保証してくれるものと考える。歩く(Operational Activity:行為) → 「場所移動する」(What:目的) +「両足交互運動方式」(How:達成方法)●運用フローアクティビティシステムユースケース■詳細説明(必要な場合):・ビジネスルール・状態図・振る舞い(シーケンス図)ビジネス要求図9 運用フローの役割6.3 システム構想設計システム構想設計は、要件仕様作成と密接に関係していることは既に説明したとおりである。この関係性を具体的内容として明らかにしながら、階層的に設計していく様子を図10 に示す。6.4 モデルによる分析(アナリシス)と統合(シンセシス)手順6.3 節で示した各階層の設計を、モデル粒度で進める概要手順を図11 に、その詳細手順を、図12 に示す。システム構想(システムアーキテクチャ)設計とは、分析(アナリシス:analysis)と統合(シンセシス:synthesis)を実施して、複数の設計解原理を導いた後、設計解原理の組合せを評価し、全体の設計解を決定する作業である。ここで、分析とは、その段階のシステムの外部から見える機能(振る舞い)を定義する作業(論理方式設計)であり、統合とは、機能に対応する複数の設計解候補(代替案:alternative)を創出する作業(物理方式設計)である。コンセプト定義運用ノードネットワークSVN(★3)組織図運用フロー図ビジネスユースケース単位で、運用フロー図を記述するステークホルダーの提供価値(★1)ミッションの単位ごとSU情報交換IFノード内の詳細な組織関係を明示内容に影響を与える範囲に影響を及ぼすBUビジネスユースケース・ミッション・ビジョン・ゴールシステムユースケース★1:運用ノードネットワークのノード間には、あるノードからあるノードへ提供する価値を記述する。それが、ビジネスユースケースとなる。★2:運用ノードは、組織をクラスと考えた時、そのインスタンスを意味するので、組織にないノード(アクタに相当)は、運用ノードとなって 存在してはならない。★3:個々のSVNを統合した(合体した)静的なSVNが存在した方が検証がしやすければ、それを作成する。(組織の)インスタンス(★2)すべての階層要素がアクタである。図8 コンセプト定義からシステムユースケースを導出するまでの関係性6 MSS 技報・Vol.31■システム構想設計機能フロー論理方式設計 物理方式設計■システム要件開発システムアクタとシステムの相互作用システム要件振る舞い設計解候補毎構造システム構成ツリー設計解を反映する設計・検証を繰り返す下位システム要件仕様定義サブシステム間仕様さらに下位の【実体設計】へ構想設計の終わりだと判断したらあい③システム構成ツリー機能展開機能展開性能配分機能非機能機能展開してサブシステムにマッピングする(非機能要件の展開を含む)下位システム要件①① ② ③論理データモデル② ③設計解原理「動作原理」を物理に基づいて設計し、設計解候補を導出する構想設計を階層的に繰り返すか?構想設計の次の階層へ(第1階層のみ)あい下位サブシステムに機能をマッピングする設計・検証・シミュレーション・品質工学・プロトタイプ(実機)システム間システムイベントトレースモデル設計書モデル設計書機能モデル品質機能展開システム内部構造図11 システム構想設計プロセス誘導要件仕様■上位の全体設計や駆動系の結果から来る要件 ●運用モード ●駆動系からの要求 ●制御アルゴリズム★飛行制御系は、機体全体要求と、駆動系の従属機能である。サブサブシステム要件仕様企画(コンセプト定義)書機体 駆動系 飛行制御系 電源系サブシステム分解航法要件仕様サブ・サブシステム■サブシステムをさらに分解した結果の、 サブサブシステムの要件 ● …… ● ……要求分析アーキテクチャ設計設計の妥当性確認サブサブシステム構想設計■機体全体の要件仕様●最高速度、最高高度●離陸: 離陸滑走距離●巡航: 航続距離、航続時間、巡航速度と高度●着陸: 着陸距離●上昇: 上昇率、上昇限度●旋回: …制御アルゴリズム仕様制御要件仕様姿勢制御要件仕様システム要件仕様要求分析アーキテクチャ設計設計の妥当性確認システム構想設計サブシステム要件仕様要求分析アーキテクチャ設計設計の妥当性確認サブシステム構想設計運用設計図10 階層化設計の流れ7 MSS 技報・Vol.31■物理方式設計詳細【適合性マトリクス】【機能フロー】技術解のかたまり設計解候補の抽出機能組合せ毎の設計解の評価機能機能【設計解一覧】へ案案案案案案案案下位機能同士の技術競合の有無を確認する論理方式設計物理方式設計ア イ ウアイウふるまいAふるまいBふるまいCふるまいD)最初のシステム構成ツリーのみ「論理データモデル」を使う物理に基づく設計解原理を 【 設計解原理導出表 】設計根拠として対応付ける下位機能 物理作用 下位機能の設計解原理【物理作用の設計カタログ】A B C DA ● ●B - ● ●C - - -D - - -機能フローの接続関係のある組合せ分、適合性マトリクスを作成する。【システム構成ツリー】 [package] EPS設計 [act6a(操舵する)]車体システム駆動系操舵系運転者運転者がハンドルを操作するハンドル操作量開始終了車両の走行方向が変化する車輪角度車輪の方向を変える車輪角度負荷トルクハンドルの動きを伝達するハンドル操作量負荷トルク車速トルク変換に必要な車速を得る車速【モデル設計書】設計解仕様【機能フロー】【機能モデル】【設計検証・解析】・機能性評価・性能評価等設計解をモデル化する説明主アクター副アクター事前条件事後条件要件要件仕様仕様要件仕様仕様要件仕様仕様仕様要件仕様仕様仕様要件要件及び仕様操舵するシステムが、運転者のハンドル操作にしたがって、運転者が意図するように車両の走行方向を変更する機能。運転者-以下の全てを満たしていること。・車両が走行中(車速≧5km/h)であること。システムは、(ハンドル操作が入力されたら)ハンドル操作を車輪の方向を変えるトルク(負荷トルク)に変換する。以下の全てを満たしていること。・車両の走行方向が、運転者の意図した方向になっていること。運転者がハンドル操作をしたら、システムは車両の走行方向を運転者が意図する方向に変更する。システムは、運転者のハンドル操作を入力する。ユースケースを終了する。システムは、負荷トルクをかけて、車輪角度を変える。システムは、車輪角度にしたがって、車両の進行方向を変更する。説明主アクター副アクター事前条件事後条件要件要件仕様仕様要件仕様仕様要件仕様仕様仕様要件仕様仕様仕様要件要件及び仕様操舵するシステムが、運転者のハンドル操作にしたがって、運転者が意図するように車両の走行方向を変更する機能。運転者-以下の全てを満たしていること。・車両が走行中(車速≧5km/h)であること。システムは、(ハンドル操作が入力されたら)ハンドル操作を車輪の方向を変えるトルク(負荷トルク)に変換する。以下の全てを満たしていること。・車両の走行方向が、運転者の意図した方向になっていること。運転者がハンドル操作をしたら、システムは車両の走行方向を運転者が意図する方向に変更する。システムは、運転者のハンドル操作を入力する。ユースケースを終了する。システムは、負荷トルクをかけて、車輪角度を変える。システムは、車輪角度にしたがって、車両の進行方向を変更する。【】【要求図】サブシステム単位下位サブシステムの要件仕様を記述プロトタイプ等’ 論理方式設計 [package] 車両 [車両の操舵構造]«block»車両«block»車体«block»操舵系運転者«block»駆動系«block»操舵機«block»操舵アシスト【システム構成ツリー】サブシステム設計・検証【設計解一覧】物理方式設計設計解仕様を反映して修正する物理設計に伴う修正を反映下位システム 要件仕様 [package] 車両 [車両の操舵構造]«block»車両«block»車体«block»操舵系運転者«block»駆動系«block»操舵機«block»操舵アシスト下位サブシステム形態チャート・モデル設計解の組合せから設計解候補の絞り込み設計解候補選択した解の組合せ機能設計解【形態マトリクス】整理しなおしabcdefg図12 機能から設計解を導出するまでの手順8 MSS 技報・Vol.31表2 システム構想設計手順内容の説明手順内容a 一段下のシステム構成ツリーを作成する設計対象システムから1つ下のサブシステムを定義する。サブシステムは概念モデルから作成した論理データモデルの中から選択する。b機能フローを作成し、「振る舞い」とサブシステムを関係づけるシステム全体の振る舞いと整合が取れるように、機能フローの「振る舞い」をサブシステムに割り当て、サブシステム間のインタフェースを定義する。c 設計解原理導出表を作成する「振る舞い」を実現する適切な「物理作用」(物理原理)を考え、その物理作用に対応する設計解候補を考え出す。d 適合性マトリクスを作成する機能フローの接続関係のある組合せ分、適合性マトリクスを作成する。適合性マトリクス縦横には、接続関係にある「振る舞い」に対応する設計解候補を並べ、それらの組合せが、優先評価する非機能要件仕様(評価指標となる)に対して適切かどうかを全組合せ評価する。e 設計解一覧を作成する適合性マトリクスの全組合せの中から、有効な設計解を左から順に並べる。f モデル検証を行う設計解一覧から有効性の高い順に検証を行う。検証方法は、そのフェーズにおいて適切なモデル検証方法(MILS / SILS / HILS / CILS)で行う。g 下位のサブシステム要件仕様を作成するサブシステムごとの要件仕様を作成する。h a ~ g を繰り返す実装設計に移行できる段階でなければ、もう一段下位のサブシステム設計を行うために、手順a ~ g を行う。MILS(Model In the Loop Simulation):プラント、コントローラ全てをシミュレーションモデルで構成SILS(Software In the Loop Simulation):MILS に対して、仮装ECU 上に実際のソフトウェアを乗せて、シミュレーションループさせる構成HILS(Hardware In the Loop Simulation):SILS に対して、ソフトだけでなくECU ハードも本物を使ったシミュレーションCILS(Component In the Loop Simulation):SILS に対して、自動車のAT なら本物のAT 本体(コンポーネント)を使ったシミュレーションシステム全体の要件仕様が作成されているとして、その後のシステム構想設計手順(図12)の説明を、表2に示す。6.5 機能展開(分析)機能は、①挙動(自己の振る舞い)、②変換(入出力の変換)、③作用(外部のモノを動かす)の3種類に区分できる。ここではシステムの機能展開であるので、どの種別の機能においても、エネルギー/物質/信号が入出力となる。エネルギー物質信号エネルギー′物質′信号′全体機能を下位機能に分解することによる機能構造の構築複雑さ下位機能全体機能図13 全体機能を下位機能に分解する6.6 機能対応の構造を設計する機能を実現する適切な「物理作用」と「物理原理」を考え、その物理原理に対応する設計解候補(機構:メカニズム)を考え出し、その様を設計解原理導出表に記載する。システムは物理原理を超えて動作させることはできないので、設計解候補とするモノの物理原理を明らかにすることが、設計の大枠の根拠となる。詳細な設計根拠は、適合性マトリクスの内容や、その内容を記載する表3 設計解原理導出表下位機能物理作用物理原理設計解原理記述内容【機能】達成すべき目的物理現象を支配する物理法則を、具体的な設計解を考慮せずに記述する。物理作用と下位機能を結びつける働きを記述する。【機構】具体化した方式6.7 設計解の統合メカ/エレキ/ソフト複合システムにおける論理設計と物理設計を繋げながら、システムを統合する考え方を図14 に示す。 ①機能展開を行い、②機能に対応する設計解候補を考え、③設計候補のうち、適切な組合せをシステムの設計解とする。④システムの設計解の妥当性を、シミュレーションや実験により確認する。⑤まだ、メカ・エレキ・ソフトに分けることができなければ(更に機能分解を行う必要があれば)、次の下位階層設計を行う。このような一見回りくどい、余分な作業のように思える論理設計を実施するメリットは、以下のとおりである。(1) 設計効率化:設計解原理(機構)の探索が容易になる。(a) 設計変更が容易になる。(b) サブシステム間のインタフェース整合性が確認しやすい。(2) 設計根拠の明示:論理設計は第三者に分かりやすい設計根拠資料の一つとなる。(3) 結合試験時の不具合予防:構想設計の初期に機能モレが発見できる。根拠となる実験データや設計検討メモがそれに当たる。9 MSS 技報・Vol.317.システムズエンジニアリングとしての設計ガイドV2 Professor のシステムズエンジニアリングへの適用ガイド内容の幾つかを示す。これは、V2 Professor 自身の設計プロセスの一部でもある。V2 Professor は、システムズエンジニアリングの開発プロセスから必要とするモデルを一旦決定し、実プロジェクトへの適用からの差異を、モデルにフィードバックすることで、その表現方法を微調整している。7.1 法律、業界基準(規定)のシステム開発への取り込み世界で初めて作るモノでない限り、どの業界にも、安全な製品を開発するために最低限遵守しなければならない基準や運用時に守らなければならない法律が存在する(航空機の例:Certifi cation Basis、Special Condition)。ところが、そのような基準や法律はドメイン内の幅広い製品に適応できるように作られているため、一読では理解できないほど一般表現されており、自身の製品に適用する場合は、解釈し、自社の製品開発が遵守していることを証明する必要がある。これを、システム開発エンジニアに解釈させるような開発プロセスにすると、無駄な作業、多大な工数を要することになる。そうしないためには、基準や法律を適切な開発プロセスフェーズに取り込み、エンジニア(最も貴重なリソース)を効率的に開発に集中させるために、法律や基準の解釈を多くのエンジニアが行わなくて済むように、「システム要件仕様」として落とし込み、エンジニアの理解できる言葉に変えておくことが重要である。さらに、基準や法律を守っている設計プロセスと開発プロダクトになっていることをトレーサビリティとして社内外の第三者に証明する必要がある。V2 Professor では、分散保存された要求と設計の対応関係を、第三者に見せるために、IT の力を借りて、見やすい形に整形して作り上げるようにしている。《論理設計》 《物理設計》 (抽象) (具体)《全体機能》《下位機能》《下位下位機能》全体機能エネルギー物質(オブジェクト)信号(メッセージ)エネルギー物質(オブジェクト)信号(メッセージ)下位機能③②①④⑤《全体構造》 設計解候補《部分構造》 設計解原理解析・検証考え方の流れシステム機能ツリーシステム構成ツリー【凡例】図14 論理設計(機能)と物理設計(機構)の進め方コンセプト定義運用ノードネットワークSVN(★3)組織図運用フロー図ビジネスユースケース単位で、運用フロー図を記述するステークホルダーの提供価値(★1)ミッションの単位ごとSU情報交換IFノード内の詳細な組織関係を明示内容に影響を与える範囲に影響を及ぼすBUビジネスユースケース・ミッション・ビジョン・ゴールシステムユースケース(組織の)インスタンス(★2)すべての階層要素がアクタである。法律、基準取り込んで、展開する先を示す図15 法律、基準は適切なプロセスに取り込む10 MSS 技報・Vol.31設計変更将来技術安全設計(FMEA)構想設計組織のミッション分析要求分析・要件開発• ミッション、ビジョンの確立• ビジネスゴールの設定ビジネス要求(ビジネスユースケース)システムの上位システムとなる業務プロセスを明確にして、その中におけるシステムの範囲を確定させる要求開発製品企画仮システム構想(設計解の発見)先行技術開発実装設計メカ設計エレキ設計ソフト設計システム構想方針(設計解)決定システム全体の機能・性能を満足するような、各種(メカ、エレキ、ソフト)システムを開発する。システム開発概念設計初期設計実体設計詳細設計ビジネス要求システム要件基本設計安全設計(例:STAMP/STPA)ミッション品質保証(安全規格、型式証明等のアセスメントを含む)《成果物作成システム》ビジネスユースケース/運用フロー/システムユースケースV2 Professor範囲外図16 開発プロセスとIT 環境の関係7.2 システム種別と要求定義種別の関係V2 Professor では、要求や要件仕様を作成する形式として、仕様のヌケモレや矛盾を発見しやすいUSDM(Universal Specifi cation Describing Manner)を利用する。しかし、USDM は、要件に関係する仕様をすぐ近くに記載するため、要件を仕様に展開するための設計手法やプロセスを保持しない設計者が使うと、当該要件と整合性のない仕様を記述したり、他の要件、仕様と矛盾する仕様を記述してしまう可能性が高くなる。加えて、記述内容だけから、それらの問題を発見することが非常に表4 開発システムの種別と作成する要求・要件仕様モデルの対応関係難しくなる。V2 Professor では、複雑な組込系開発の場合、要件から仕様を決定するまでの間には、必ず、構想設計(アーキテクチャ設計)の過程を挟むことを明示している。また、開発対象システムの種類に応じて、ビジネスユースケースからシステム要件仕様までの成果物は、必要最小限となるよう、その選択指標を示している(表4)。この中で、USDM の記述形式も、シナリオ法か、システム機能展開法かを選択するようにしている。11 MSS 技報・Vol.31誘導要件仕様■上位の全体設計や駆動系の結果から来る要件 ●運用モード ●駆動系からの要求 ●制御アルゴリズムサブサブシステム要件仕様企画(コンセプト定義)書機体 駆動系 飛行制御系 電源系サブシステム分解航法要件仕様サブ・サブシステム■サブシステムをさらに分解した結果の、 サブサブシステムの要件 ● …… ●要求分析アーキテクチャ設計設計の妥当性確認サブサブシステム構想設計■機体全体の要件仕様●最高速度、最高高度●離陸: 離陸滑走距離●巡航: 航続距離、航続時間、巡航速度と高度●着陸: 着陸距離●上昇: 上昇率、上昇限度●旋回: …制御アルゴリズム仕様制御要件仕様姿勢制御要件仕様システム要件仕様要求分析アーキテクチャ設計設計の妥当性確認システム構想設計サブシステム要件仕様要求分析アーキテクチャ設計設計の妥当性確認サブシステム構想設計要件項目自体がノウハウである図17 上位下位の階層間システムで要件項目は変わる7.3 要求・要件仕様の設定項目フレームがノウハウである制御系の要件仕様はアーキテクチャ依存度が高い。これは要件の項目がアーキテクチャとの関係性が高いということであるから、要件項目自体が制御系システム設計に関する知識依存度が高いということである。決めるべき要件のタイトルが項目リストとして事前に提供されるだけで、設計者は要件内容として何を決めれば良いか見当を付けることができ、かつ、記述内容を絞ることができるので、設計生産性を向上させる価値は非常に高い。7.4 制御機能の階層化設計プロセスを中心に従属機能を階層化設計する制御系システムにおけるMBD では、制御器(コントローラ)の実装を睨んで、簡易モデルから詳細モデル、そして、実機検証モデルまで段階を追って詳細化しながら、モデルごとに徐々に仕様を決めていく。この一連のモデルの詳細化手順は、MBSE における階層化構想設計手順に沿って行う。MBD の制御器を設計する流れを図18 に示す。ここで、プラントや制御器のモデルを検討するのに、設計解原理導出表の「物理作用」を考慮した設計解を利用する。START(1)簡易モデル(2)詳細モデル(3)実機検証モデル実装END工程の進行モデルを詳細化仕様決定まで繰り返し仕様決定まで繰り返し仕様決定まで繰り返し図18 制御系システムの階層化設計フロー表5 制御系システム開発の手順手順設計内容1 機能・機構の仮設計当該設計対象階層レベルに対応する設計解原理導出表(物理原理)を利用して、モデル(センサ・アクチュエータ等)の機能と機構の仮定義を行う。制御対象(プラント)のシステム同定2 モデリング制御対象の物理モデリング、システムの同定を行う。3 アナリシス制御対象の性質の解析(安定性、減衰特性、定常特性など)4 制御系仕様の決定制御目的から導かれる制御系への要求を決定する。制御器(コントローラ)の設計:古典制御、現代制御、ロバスト制御など5 制御器のゲインの算出適切な設計法、PID 制御/ロバスト制御(H∞最適制御)などを選ぶ。6 制御器の評価数値シミュレーションや評価として妥当な簡易プラント実験を行い、設計した制御器の仕様の妥当性評価を行う。7 制御器の実装、試験実機に制御器を実装した試験を行う。 ★1~7の手順をうまく行くまで繰り返す。コントローラプラント目標値 制御器 入力 制御対象 出力+- 図19 プラントと制御器(コントローラ)の関係各レベルのモデルは、通常の制御系システム開発の手順で行う(表5)。12 MSS 技報・Vol.31 [block] 車両 [車両]: 車体車輪角度変化量推力抗力センサ入力: 駆動系駆動系データ推力抗力センサ入力: 操舵系車輪角度変化量駆動系データ [block] 駆動系 [駆動系]センサA センサBデータP データQ 推力 抗力: エンジンセンサAデータPエンジン出力: トランスミッションセンサBデータQエンジン出力推力抗力 [package] 車両 [車両の操舵構造]«block»車両«block»操舵系«block»駆動系«block»操舵機«block»操舵アシスト«block»エンジン«block»トランスミッション«block»車体«block»機器D1«block»機器D2«blo...«blo...«blo...«blo...システム内部構造:システムシステム内部構造:サブシステムシステム構成ツリー(1)(2)(3) (4)(1)(2)(2)(3) (4)図20 システム構成ツリーと対応するシステム機能フロー(システム内部構造)センサ入力センサセンサ駆動系データデータデータ車輪角度変化量推力前輪推力後輪推力抗力摩擦力静止時摩擦力走行時エンジン出力インタフェース辞書インタフェース辞書の凡例記号意味説明X=A Aに等しいデータ名(左辺X)が、右辺に列記したデータ、値から成り立つことを示す。A+B A と B複数の構成要素を1つのグループにまとめる。ただし、記載の順序に意味はない。M { A } N Aの反復中かっこで囲んだ内容を任意回数繰り返す。繰り返し回数はM回以上、N回以下を表す。[ A | B ] A または B のどちらか複数の項目から一つだけが選択されることを示す。(A) A の任意選択必須ではない(なくてもよい)項目を示す。/A/ 構成要素これ以上分割できないアトミックなデータ(構成要素)を示す。/* A */ コメント項目説明用の記述を示す。図21 インタフェース辞書7.5 インタフェース設計機能設計を行えば、必ず、機能間を結ぶ論理インタフェース設計を行わなければならない。階層設計を行う場合、上位/下位で整合のとれた論理インタフェース設計を行わなければならないし、最終段で明らかになる物理インタフェースとの対応関係も明確にする必要がある。それらの整合を取るためには、サブシステムの階層化表現と同期しながら作成するインタフェース辞書を使って、インタフェースデータを階層表現することで実現する。これはデータフローダイアグラムの辞書を作成するのと同じ考え方である。インタフェース辞書を開発におけるモノを表現するモデルから独立させ、インタフェース定義データベースのように扱うことで、他の表現モデル(例:イベントトレースモデル)間のメッセージデータと整合しているかどうかも検証できるようになる。13 MSS 技報・Vol.318.V2 Professor の実務適用能力が高い理由8.1 なぜ、V2 Professor は、大規模システムや幅広い分野の設計に対応できるのか弊社は、幅広い分野の組込系/情報系の開発を、システム開発支援からソフトウェア開発まで出荷後品質を保証する完全請負形態で行っており、開発で生じた本質的問題を把握できる立場にある。先に述べたように、その問題と対策は、V2 Professor にフィードバックし、改善したメタモデルを開発に適用することで実践検証を続けてきているので、規模の大小に関わらず、また、分野依存性の少ない開発プロセスのメタモデルを作ることができている。8.2 なぜ、V2 Professor は、生産性と品質を向上させることができるかV2 Professor は、弊社で実践している開発プロセスと品質管理・保証(CMM レベル4、Automotive SPICEレベル4)からの知見が反映されたガイドである。弊社は、CMM、A–SPICE の理解活動を通じて、現場のエンジニアが自分たちの開発プロセスを主軸に品質規則を作り上げている。したがって、技術活動を支援する品質保証の仕組みが技術的な開発活動と齟齬無く動く仕組みができあがっており、品質保証活動だけが一人歩きし、現場活動とは異なる書類ができあがるということがない。さらに、V2 Professor の枠組み外ではあるが、現場の開発活動の問題点が、品質保証活動の中で、いち早く、第三者にも見える状態に保たれている。この品質保証(QC)の仕組みは、異常値を起こさない設計の支援活動であり、V2 Professor を外から支援する重要な役割を果たしている。8.3 構成・変更管理システム開発規模が大きくなればなるほど、設計変更の効率化が最も生産性に効いてくる。レビューをすれば必ず、一定量の設計変更・誤りが発見される。これを適切に設計に反映していくためには、リアルに設計書のトレーサビリティが確立されており、影響度を確実に把握できるよう制御されている状態が必要である。しかし、多くの会社では、後追いでトレーサビリティマトリクスを作成して…という開発とトレーサビリティの間に遅れが発生する状態が起きている。その間にも変更は生じるので、開発とトレーサビリティのズレが大きくなる。V2Professor はモデル作成の段階でトレーサビリティを取っておき、レビュー後には、再度、トレーサビリティを確立し直せるというサイクルを設計行為の中で回すことができる。図22 弊社の事業ドメイン14 MSS 技報・Vol.319.V2 Professor を使った工程管理9.1 品質プロセスと技術プロセスの関係V 字プロセスは、時間軸を表していない。設計をアジャイルに実施するためには、いかに設計変更の反映可否を判断し、反映実行を完了させることができるかが鍵となる。設計書間のトレーサビリティが完備されているプロセスフレームがあれば、変更箇所が特定できれば、そこを中心に影響が及ぶところまで検討を広げて行きやすくなる。新規開発の場合も、開発しやすい箇所から始めれば良い。10.ソフトウエア会社がシステムズエンジニアリングプロセスを作れるのかシステムズエンジニアリングの骨格は、アナリシス(機能展開)と、シンセシス(構造統合)である。機能展開は、抽象化を進めていく作業であり、抽象化を主体に進めていくソフトウェア開発の知識が活かせる。シンセシスは、物理的な構造ノウハウ集(存在するとして)から機能に適合する設計解を探し出し、組合せ最適を探す作業であり、その探し方(プロセス)を決める作業は、抽象的な能力が必要とされる。このように具象と抽象を行き来する作業プロセスを決めるのは、ソフトウェアでは、クラス設計時に通常行っていることであり、知識分野が違ったとしても、統一プロセスを作るのに必要な能力は変わらない。11.むすびV2 Professor は、モデルレベルでのトレーサビリティ整合が取れる標準設計ガイドラインとすることを目標として、10 年にわたる現場での実践から得られた知見を反映してきている。そして、現在も、現場のノウハウ、理論を反映させながら成長し続けている。設計作業自体、一般的にはパターン化が難しいことから、それを設計ガイドとすることは難しい。事実、説明を多くすれば良いというものではなく、多過ぎるとそれに頼ってしまい考えない人が増える。少な過ぎると、使い物にならないものができあがる。これは、一つには、万人に使えるガイドを作成しようとするからであり、ガイド利用者のスキルレベルを考慮し、スキルの高い人は、ツールで表現方法を統一するための作図ガイドで十分事足りるし、設計知識不足の人には、「設計方法」を教育するための「設計ガイド」が必要であろう。そのようなガイド分割が必要であることも、実践を通じて学んだ。理想を目指す活動を継続している限りは、近づくはずと考えながら理想の標準を今後も目指していく。本内容を基に、弊社の設計教育を受講いただき、実践的な題材を提供いただきました様々な分野の社外の方々からのフィードバックが、現場で使える設計モデル作成ルールとなっています。変化する設計ルールを根気強く適用し続け、改善へのヒント、気づきを頂いた多くの方々に感謝の意を表します。参考文献(1) Paul,G.,Beitz,W.,Feldhusen,J.,Grote,K.H.:エンジニアリングデザイン 工学設計の体系的図 24 アジャイルな変更管理を可能とする仕組み アプローチ,第3版,森北出版(2015)タスク1 2 3 4 5 61 AA2 BB3 CC4 DD5 EE6 FF999 9999 93 39 123456大きな手戻り6 1 2 3 4 51 AA2 BB3 CC4 DD5 EE6 FF9991234569 9 93 39 9 9 手戻りリスクが軽減!タスク順序タスク順序分析タスク3、4、5は、協調して作業が必要なリスクタスク99タスク1、3はタスク6実行後に大きな手戻り作業が発生する【 分析前 】【 分析後 】順送り作業領域手戻り作業領域数値は、タスク間の関係の深さを示す電通国際情報サービス(iSiD)様資料を参考に修正・Vモデルは、時系列的なプロセスとなっている考え方を表したものである「システムズエンジニアリング入門」 慶応大学准教授 白坂成功より図23 V 字モデルの意味9.2 アジャイル管理のコツV 字モデルは設計の進め方順序を示すモノではなく考え方を示すものであるからこそ、推論できる人が行う派生開発やボトムアップ開発は成り立つ。現実の開発現場を見ると、新規設計管理のように、一気に計画(WBS 構築)することが難しい場合、アジャイル的にWBS を構築していく方法を採るのが良い(具体的には、WBS 構築は開発よりも少し早めにする程度に留める)。さらには、その活動のサイクルに合わせたメトリクス収集・改善を実施するのが良い。15 MSS 技報・Vol.31(2) 宇宙航空研究開発機構:JAXA 制御系設計標準,JERG–2–500A(2013)(3) 宇宙航空研究開発機構:JAXA システム設計標準,JERG–2–100(2016)(4) 田浦 俊春:創造デザイン工学,東京大学出版会(2014)(5) 藤原 啓一:要求から詳細設計までをシームレスに行うアジャイル開発手法,MSS 技報,24(2014)https://www.mss.co.jp/technology/report/pdf/24-04.pdf(6) 藤原 啓一:大規模組込システムの要求分析、システム方式設計、そして、ソフトウェア設計までをつなぐモデルベース設計手法,MSS 技報,27(2017)https://www.mss.co.jp/technology/report/pdf/27_03.pdf(7) 畑 剛,ほか:航空・宇宙における制御,コロナ社(1999)(8) 廣田 幸嗣,ほか:電気自動車の制御システム,東京電機大学出版局(2009)V2 Professor は、三菱スペース・ソフトウエア株式会社の登録商標です。SysML、UML は、OMG(Object Management Group)の登録商標です。Cameo Systems Modeler は、Dassault Systèmes 社の米国及びその他の国における商標又は登録商標です。Enterprise Architect は、Sparx Systems 社の登録商標です。Genesys は、Vitech 社の米国及びその他の国における登録商標です。CMM は、米国カーネギーメロン大学の米国における登録商標です。Automotive SPICE は、Verband der Automobilindustiee.V.(VDA)の登録商標です。執筆者紹介藤原 啓一1985 年入社。防衛のソフトウェア開発に従事以降カーナビ、気象レーダ、ニューラルネット、医用画像、衛星通信、業務系システム、通信システム、車載制御システム等のシステム設計、ソフトウェア開発に従事。2015 年から副事業部長。