テクノロジー
技術レポート:アーカイブ
Category:ロケット・宇宙機・人工衛星開発
自律海中探査機の開発支援
本稿では、国立研究開発法人海洋研究開発機構(JAMSTEC)が進める、自律海中探査機「おとひめ」における自律航行機能の開発内容について報告する。我々は、航空宇宙分野で築いた技術を応用し、2012年度から「おとひめ」における運動制御CPUへ搭載するソフトウェア(SW)を開発している。具体的には、運動制御シミュレータ開発、運動パラメータの同定、航行・姿勢制御系の設計、搭載SW開発等を実施してきた。これらの開発内容、海域試験での適用結果等について報告する。
参考情報:
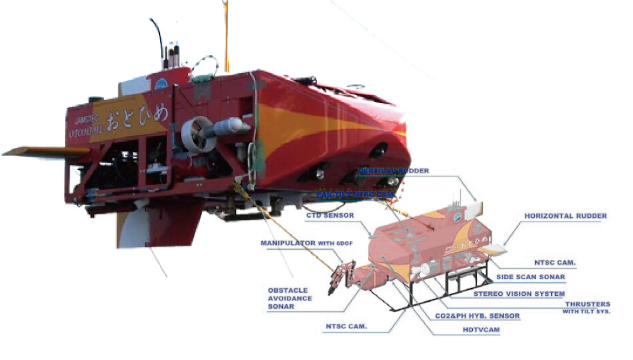
1 MSS技報・Vol.27*中部事業所 **つくば事業部 第二技術部 ***日本アドバンス・テクノロジー湘南事業所 †国立研究開発法人海洋研究開発機構 自律海中探査機の開発支援 Development support of Autonomous Underwater Vehicle 池田 佳起* 山本 一二三** 神山 恭洋*** 石橋 正二郎† 大田 豊†Yoshiki Ikeda, Hifumi Yamamoto, Yasuhiro Kouyama, Shojiro Ishibashi, Yutaka Ota 本稿では、国立研究開発法人海洋研究開発機構(JAMSTEC)が進める、自律海中探査機「おとひめ」における自律航行機能の開発内容について報告する。我々は、航空宇宙分野で築いた技術を応用し、2012年度から「おとひめ」における運動制御CPUへ搭載するソフトウエア(SW)を開発している。具体的には、運動制御シミュレータ開発、運動パラメータの同定、航行・姿勢制御系の設計、搭載SW開発等を実施してきた。これらの開発内容、海域試験での適用結果等について報告する。 “Otohime” is one of the autonomous underwater vehicles that are developed by Japan Agencyfor Marine-Earth Science and Technology(JAMSTEC). For the development of the on-boardsoftware controlling the motion of the vehicle, Mitsubishi Space Software(MSS)supportJAMSTEC since fiscal year 2012 by applying our expertise in aerospace field. This paper presentsour contributions to the development of“ Otohime” and also shows the results of sea trials of her. 1.まえがき (1)(2) 近年、地球環境、エネルギー資源への関心の高まりから、海洋環境、海底鉱物資源が注目されている。我が国は、国内で消費するエネルギー・鉱物資源のほとんどを海外からの輸入に依存しているため、我が国の領海および排他的経済水域の海底に広く存在する鉱物資源の調査・開発が望まれている。海洋環境、海底鉱物資源の調査では、海面上の調査に加えて、注目される海域でのより詳細な調査、探索が必要となる。このため、有人、無人の海中探査機が開発されている。無人型海中探査機は、遠隔操作型無人海中探査機(ROV)と自律型無人海中探査機(AUV)に大別される。「おとひめ」は、国立研究開発法人海洋研究開発機構(以下、JAMSTECと称す)が海中環境の調査と海底鉱物資源の探査を目的として開発している海中探査機の一つであり、ROVとAUVの両方の機能を併せ持っている。本稿では、三菱スペース・ソフトウエア㈱が航空宇宙分野で築いた技術を応用し、「おとひめ」の開発支援をしている内容について紹介する。2.「おとひめ」の概要(2) 「おとひめ」の外観を図1に示す。また、その仕様と機器の配置をそれぞれ図2、表1に示す。「おとひめ」は、スキッドとマニピュレータを装着し、海底に着底して支援船上の運用者から操作されるROVモードと、これらを装着しない形態で自律的に運用されるAUVモードがある。図1に示した外観図は、図2のROVモードで搭載されているマニピュレータとスキッドを外したAUVモードとしての形態であり、当社が支援している図1 「おとひめ」の外観(2)図2 「おとひめ」における機器配置(2)2 MSS技報・Vol.27は、まず、AUVの運動方程式(3)に対して、「おとひめ」の形状より機体の各種流体力係数を推算し、計測設計情報(質量特性、浮力等)と統合し、「おとひめ」の機体運動シミュレーションモデルとして構築した。このモデルをベースとして、海域試験により取得した「おとひめ」の実航行データに基づきパラメータを同定し、より信頼度の高い運動モデルへ更新した。この更新後のモデルに基づき、姿勢制御、航行制御系を設計し、航行シナリオに基づき自律航行を遂行する運動制御用の搭載SWを製作した。これらの開発をするためにシナリオ運動制御用の航行シミュレータを開発し、設計した制御系の確認、搭載SWの機能確認、実航行時の実時間モニタ、航行後の評価解析を実施している。製作したSWを海域試験に供し、良好な結果を得ている。以降では、これらについて紹介する。3.2 制御モデルの構築 「おとひめ」の自律航行制御系を設計するためには、制御対象である機体の数学モデルが必要となる。数学モデルは、一般的なAUVモデル(3)を参考に、「おとひめ」形状から流体力係数を推算し、仮の数学モデルを製作した。図3に数学モデルの概要を示した。このモデルを使用して流体力係数を同定するための試験ケースをシミュレーションにより検討し、このケースに基づく海域試験で航行データを取得した。表2に試験ケース例を示した。これらの試験データに基づき流体力係数を同定し、以降の機体モデルとして使用している。図4にパラメータ同定の手順を示し、図5には、水平翼のジグザグ(Zig-Zag)動作による機体流体力係数のパラメータ同定自律運動制御は、この形態を対象としてきた。おとひめの航法装置は、GPS、INS(慣性装置)、DVL(ドップラ計測装置)で構成され、位置計測としてSSBL(超短基線)、LBL(長基線)、VLBL(仮想長基線)による水中音響計測が可能である。アクチュエータは、機体前方の左右に装着されたスラスタがピッチ面内で傾斜可能であり、機体後方に可動部を含む垂直翼、水平翼がそれぞれ2枚、搭載されている。3.開発支援3.1 概要 当社は、2012年度から「おとひめ」の運動制御CPUへ搭載するSWの開発を支援してきた。支援内容として表1 「おとひめ」の仕様(2)表2 流体力係数同定のための試験ケース例図3 「おとひめ」の数学モデル3 MSS技報・Vol.27結果を示した。図には、同定前後のピッチ回転レートのシミュレーションと実航行データとの比較が示されている。パラメータ同定によりシミュレーションと実航行データが良く一致するようになり、「おとひめ」の数学モデルの信頼性が向上したことが分かる。3.3 制御系開発 「おとひめ」の自律航行機能を実現するために開発した制御機能の一覧を表3に、制御機能の構成を図6に示した。航行制御系は、現在時点から目標点を目指すWay Point制御と目標ラインに機体を追従させるWayLine制御で構成される。また、これらの制御で必要となる方位制御、深度制御、高度制御を開発している。姿勢制御は、下位の制御系であり、上位制御である航行制御系からの目標姿勢に現在姿勢を追従させる。速度制御は、目標速度に機軸方向速度を追従させる。制御系は、いずれもPID制御で構成し、簡易モデルによる制御フィルタ、ゲインの設計後に、6自由度シミュレーションにより各種ケースを実行し、微調整を実施した。図4 流体力係数パラメータ同定の手順図5 Fin Zig Zagケースによる流体力係数パラメータの同定例表3 「おとひめ」の制御機能一覧4 MSS技報・Vol.273.4 搭載SW開発 前節にて紹介した制御系機能に自律航行に必要な機能を加えて、運動制御用の搭載SWを開発した。開発した搭載SWの構成を図7に示す。開発したSWは、シナリオ航行処理により、事前に設定した一連の航行シナリオに従って、Way Point制御、Way Line制御等の制御モードを切り替えながら機体をシナリオ通りに航行させる。また、ROVモードにて船上の指令装置から指定された方位角、深度等の目標に追従するために方位角制御、深度制御等を単独で実行する単独制御航行処理も実装している。搭載SWは、次節で紹介する航行シミュレータと組み合わせてシミュレーションを行い、制御系開発にて使用した設計用シミュレーションの結果と比較することで機能確認を行った。また、他の搭載SWとのインタフェース確認、「おとひめ」との陸上試験によるインタフェース確認を実施し、実海域での試験に供した。3.5 航行シミュレータ開発 自律航行シナリオの作成とシミュレーションによるシナリオ動作確認、実航行時の搭載SWの状態監視、航行後の搭載SWの機能評価を目的に航行シミュレータを開発した。図8に概要を示す。本ツールは、作成したシナリオと実航行時の航跡を同時に表示することも可能である。3.6 海域試験 2015年3月20日~24日において相模湾・駿河湾にて海洋調査船「なつしま」を母船として、「おとひめ」の海域試験が実施され、当社もこれを支援した。この時の試験結果から、単独制御航行処理の方位制御試験と深度制御試験の結果を図9、図10に示す。図9より、目標方位が達成されていることが確認できる。図10の深度制御において、カウンター値76,000付近にて目標深度の到達前に目標深度が切り替わっている。本試験のコンフィギュレーションでは、浮力が比較的大きく設定されていたため、潜航速度が小さく、この目標には到達できなかったが、以降の目標深度には到達し、深度も良く制御できていることが確認できる。3.7 大室ダシ・大室海穴探査 2015年10月29日~11月1日に大室ダシ・大室海穴にて海洋調査船「なつしま」を母船として、自律航行試験が実施され、当社も支援した。ここでは、10月30日に実施したWayPoint、WayLineのシナリオ航行試験の結果を図6 「おとひめ」の制御系の概略構成図7 運動制御用搭載SWの構成5 MSS技報・Vol.27紹介する。図11に目標Way Pointと航跡を示した。図より、機体は、シンリオ開始点からWP1(Way Point1)へ向かい、WP1到達後にWP2(Way Point2)とWP1を結ぶライン(Way Line)に沿って航行していることが確認できる。図12には、この時の進行速度を示した。目標速度である0.41m/secにほぼ一致した速度を維持できていることが確認される。 なお、10月31日に「おとひめ」は、大室海穴内部をWayLineに沿った高度制御によりシナリオ航行を実施し、搭載した3Dレーザースキャナーによる海底熱鉱床を観測している。これにより、世界初の自律海中探査機による海中レーザースキャニングによる海底熱水噴出域の3D可視化及び計測に貢献した(4)。図8 航行シミュレータの概要図9 方位制御の例図10 深度制御の例6 MSS技報・Vol.274.むすび 本稿では、自律海中探査機「おとひめ」の自律航行機能について、その開発内容を紹介した。開発においては、航空宇宙分野での長年に渡る、多くの運動制御シミュレーション、搭載SW開発等に基づく技術を応用している。「おとひめ」は、現在、目標設備への自動ドッキング機能を開発中である。当社は、今後も、運用要求の高度化に対応したより高度な自律性を伴うAUVの開発に引き続き従事し、我が国の海洋探査に一層の貢献をしていきたい。参考文献⑴ JAMSTEC海洋技術ビジョン,国立研究法人海洋研究開発機構,http://www.jamstec.go.jp/j/about/vision/⑵ The development of an autonomous underwatervehicle “Otohime” with the multiple operation,Shinji Ishibashi et al, Mechatronics andAutomation(ICMA),2013 IEEE InternationalConference,4-7 Aug. 2013⑶ Handbook of Marine Craft Hydrodynamics andMotion Control,ThorI.Fossen,WILEY,2011⑷ AUV搭載式3Dレーザースキャナーによる海底熱水域の可視化に成功,国立研究法人海洋研究開発機構http://www.jamstec.go.jp/j/about/press_release/20151202/プレスリリース 2015年12月2日執筆者紹介池田 佳起1985年三菱スペース・ソフトウエア株式会社入社。H2、H2A、H2B等の宇宙輸送機の航法誘導搭載ソフトウエア開発、解析業務に従事。その後、航空分野、海洋分野での運動制御解析、ソフトウエア開発に従事。現在、中部事業所 副所長。山本 一二三1991年三菱スペース・ソフトウエア株式会社入社。HTV、イプシロン・ロケット等の宇宙輸送機の航法誘導搭載ソフトウエア開発、解析業務に従事。その後、海洋分野での運動制御ソフトウエア開発に従事。現在、つくば事業部 第二技術部 次長。神山 恭洋1990年日本アドバンス・テクノロジー株式会社入社。防衛装備品のソフトウエア開発業務に従事。その後、衛星地上システムのソフトウエア開発に従事。現在、湘南事業所 開発第二部部長。石橋 正二郎2003年海洋技術科学センター(現国立研究開発法人海洋研究開発機構)入所。海中探査機「うらしま」「MR-X1」「ゆめいるか」「じんべい」「おとひめ」等、複数の海中探査機開発に従事。現在、海中探査機に適用する光学可視化技術の研究開発を担当。海洋技術開発部探査機技術グループ・グループリーダー代理(主任技術研究員)大田 豊2010年独立行政法人海洋研究開発機構(現国立研究開発法人海洋研究開発機構)入所。大気海洋相互作用の長期観測を目的とした洋上ブイ及び係留系の開発業務に従事。その後、海中探査機の開発、要素技術研究に従事し、「じんべい」、「ゆめいるか」、「おとひめ」の開発に携わる。現在、海中探査機の機体流体特性を担当し、自律型無人探査機の開発業務に従事。図11 シナリオ航行時の目標Way Pointと航跡図12 シナリオ航行での速度制御