テクノロジー
技術レポート:アーカイブ
Category:ロケット・宇宙機・人工衛星開発
HTV運用管制システムの開発
2009年9月に打ち上げられた無人の宇宙ステーション補給機(以下、HTVという)技術実証機は、国際宇宙ステーション(以下、ISSという)にランデブ・ドッキングし、物資を補給した後にISSから離脱して大気圏に突入し燃え尽きるというミッションを達成した。
HTV運用管制システム(以下、HTVOCSという)はHTVのミッション達成のために地上の運用管制要員が使用する運用計画、運用管制及び運用訓練の機能を備えたシステムである。本稿ではHTVOCSの主要な機能を紹介する。
参考情報:
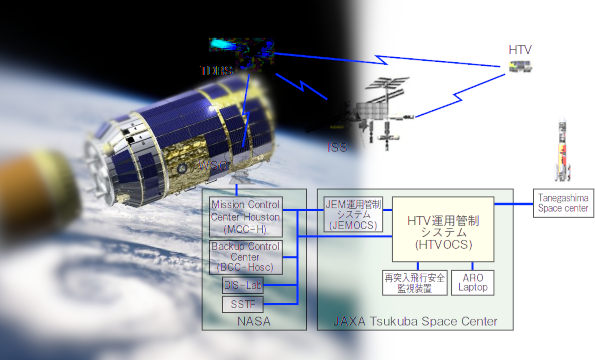
MSS技報・Vol.21 8小特集*鎌倉事業部 宇宙第一技術部 **三菱電機株式会社 HTV運用管制システムの開発Development of HTV Operations Control System 手川 浩二* 栗原 淳* 宮野 悟* 三上 隆介* 稲垣 尚紀* 金井 龍夫* 佐藤 正則** Koji Tegawa, Jun Kurihara, Satoshi Miyano, Ryusuke Mikami, Takanori Inagaki, Tatsuo Kanai, Masanori Sato 2009年9月に打ち上げられた無人の宇宙ステーション補給機(以下、HTVという)技術実証機は、国際宇宙ステーション(以下、ISSという)にランデブ・ドッキングし、物資を補給した後にISSから離脱して大気圏に突入し燃え尽きるというミッションを達成した。 HTV運用管制システム(以下、HTVOCSという)はHTVのミッション達成のために地上の運用管制要員が使用する運用計画、運用管制及び運用訓練の機能を備えたシステムである。本稿ではHTVOCSの主要な機能を紹介する。 H-II Transfer Vehicle(HTV)was launched in September,2009 and achieved a mission todeliver cargoes to the International Space Station(ISS). To support HTV rendezvous flight mission, functions of HTVOCS(HTV Operations ControlSystem)are greatly different from the operations control systems for other satellites. This reportdescribes the feature of HTVOCS. 1.まえがき HTV技術実証機は2009年9月11日に種子島宇宙センターからH-IIBロケット試験機により打ち上げられ、同年9月18日に日本で初めての宇宙船としてISSとのランデブ・ドッキングに成功した。HTV技術実証機は約1ヶ月半ISSに係留されて物資を補給し、その後、ISS内の廃棄物を搭載してISSを離脱し、同年11月2日に大気圏に突入してミッションを終了した。 HTVOCSは、HTVが実施するランデブ・ドッキングや大気圏突入のための運用管制システムとして1999年から開発を開始し、2007年に完成した。その後、運用訓練、手順書検証等の運用インテグレーション作業を通して実際に使用し、管制要員からの運用性機能改善要望に基づく機能付加を行った上でHTV技術実証機の運用に供し、そのミッションを成功に導いた。 宇宙航空研究開発機構(JAXA)殿が開発するHTV運用に係わる地上運用システムのうち、HTVOCSの開発を三菱電機株式会社がとりまとめ、その中で三菱スペース・ソフトウエア株式会社は、HTVOCSのアプリケーションソフトウェア開発全般を担当した。2.HTV運用管制システムの概要 HTVOCSは、JAXA筑波宇宙センター宇宙ステーション運用棟に整備された、HTVの飛行運用計画立案、テレメトリ・コマンド運用、データ管理及び管制要員訓練を行う機能を提供する運用管制システムである。HTVOCSの位置づけを図1に示す。 HTVOCSは、以下の3種類のテレメトリ・コマンド伝送経路を利用してHTVとの間の通信を行う。⑴ 射場の種子島宇宙センターを経由する伝送経路⑵ NASAの施設とデータ中継衛星TDRSのみを経由する伝送経路(TDRSリンク)HTVTDRSWSCISSMission ControlCenter Houston(MCC-H)SSTFBackup ControlCenter(BCC-Hosc)DIS-LabJEM運用管制システム(JEMOCS) HTV運用管制システム(HTVOCS)TanegashimaSpace centerNASA JAXA Tsukuba Space CenterAROLaptop再突入飛行安全監視装置図1 HTV運用管制システムの位置づけ9小特集用管制要員がタイムリーな判断と迅速な対応を取るための情報を提供する。⑶ HTVOCSのHTVシミュレータとNASAの訓練施設内に設置されているISSシミュレータを国際回線を介して接続し、相互に位置・速度やテレメトリデータを同期をとりながら取り込んでシミュレーションを実行する分散シミュレーション機能により、地理的に離れた日米の運用管制チームに対してHTVとISSの挙動を高精度に模擬したジョイント訓練環境を提供する。 これらの特徴を実現するHTVOCSの各サブシステムの機能と技術を以下に紹介する。3.1 飛行計画サブシステムの技術 HTVOCSの飛行計画サブシステム(以下、計画SSという)はHTVの飛行計画を立案し、運用手順書の作成を行うサブシステムである。 従来の運用管制システムは軌道計画、ミッション解析、運用計画の機能が別々のシステムに分かれていたのに対し、HTVOCSではこれらがすべて計画SSに含まれる。これにより軌道計画から運用計画まで一貫して実施することが可能となった。HTVOCSの運用管制要員が図2に示す軌道計画の立案から運用手順書の作成までの一連の手順を単独で実施することが可能であり、計画に要する時間を短縮した。⑶ NASAの施設、データ中継衛星TDRS、及びISSを経由する伝送経路(ISSリンク) HTVの打ち上げ前は⑴の種子島宇宙センターを経由する伝送経路を利用し、打上げ後はHTVとISSの距離に応じて、HTVがISSから遠く離れた場所を飛行しているときは⑵のデータ中継衛星経由を、ISSから数十キロ以内では⑵のデータ中継衛星経由と⑶のISS経由の二つを、ISSに係留されているときは⑶のISS経由の伝送経路を利用する。 HTVOCSは以下の3つのサブシステムから構成されている。⑴ 飛行計画サブシステム 飛行計画の立案、運用手順書の作成を行う⑵ 飛行管制サブシステム テレメトリ・コマンド運用、データ管理を行う⑶ 訓練・試験支援サブシステム 管制要員訓練のためのシミュレーションを行う3.HTV運用管制システムの技術紹介 HTVOCSは従来衛星の運用管制システムと比較して、次のような特徴を有する。⑴ HTVの単独飛行運用と、ISS近傍域や係留中におけるNASAとの協調運用の両方を達成する機能を備えている。⑵ ランデブ飛行中の逐次変化していくHTVとISS両方の現在の軌道と予測軌道を同一の画面に表示し、運入力データ飛行計画サブシステム軌道計画機能出力データ予測軌道生成軌道計画・ISS予測軌道・TDRS予測軌道・GPSエフェメリス・HTV打上げ予定日・H-IIBロケット軌道・HTV機体重量特性・基本飛行シーケンス・打上げ可能日、打上げ時刻・マヌーバ時刻、増速度量・HTV軌道データ・マヌーバ姿勢・誘導制御パラメータ・データ中継衛星可視解析結果・LST、日照日陰、β角情報・光学センサ干渉情報・GPS可視解析結果・リソース解析結果・タイムラインデータ・手順書データ・アクティビティ定義データ(データ中継衛星利用要求等)タイムライン、手順書作成タイムライン源泉データ運用計画立案運用計画機能運用解析・TDRS可視解析・運用制約(β角、光学センサ干渉等)解析・GPS可視解析・リソース解析ミッション解析機能軌道計画結果データミッション解析結果データ図2 計画立案処理の作業の流れとデータ入出力MSS技報・Vol.21 10 また、運用計画機能は、データ中継衛星TDRSを利用するために必要な予約時間とHTVの軌道情報を作成してNASAに送付する機能や、NASAから送付された予約結果を視覚的に確認する機能を備え、立案する運用管制要員の負担を軽減している。 図4はこれらの機能を用いて運用計画を立案した画面の一例である。3.2 飛行管制サブシステムの技術 HTVOCSの飛行管制サブシステム(以下、管制SSという)は、HTVのリアルタイムの制御及び状態監視とデータ管理を行うサブシステムである。 図5に管制SSの機能構成概要を示す。 従来衛星の管制システムと大きく異なる点は、HTVのみならず、ISSや、ISS上の「きぼう」こと日本実験棟(以下、JEMという)に設置された近傍域通信装置(以下、PROXという)のテレメトリをNASAの地上設備を経由して受信し、これらを統合的に処理することが可能な点である。また、従来の管制システムに実装されるようなテレメトリ・コマンド機能、データ管理機能に加えて、HTVのランデブ運用を支援するための航法誘導支援機能も有する。 航法誘導支援機能は、計画SSにおいて立案された軌道計画を元に生成された計画軌道データ、HTVとISSとPROXからリアルタイムにダウンリンクされるテレメトリより算出した現在の航法値、更には現在の航法値を元に伝播した未来の航法値を比較評価することにより、HTVとISSの距離や、接近・離脱等のフライトフェーズに応じて、運用管制要員がHTVのフライト状況の健全性を確認するために必要となる様々な情報を提供する機能を有する。⑴ 軌道計画機能 軌道計画機能はHTVがISSへランデブするために飛行する経路を立案する機能を有する。図3は計画SSの近傍ランデブ軌道計画画面であり、ISSと同じ高度を飛行するHTVがISSに捕捉される地点まで飛行する経路を計画した例である。飛行する経路やISSとの相対位置、ISSに対する安全確保領域を視覚的に表すことができる。通常の飛行経路以外にも、異常が発生して飛行経路を外れた場合に、一旦遠ざかり再度ランデブするための飛行経路計画も立案することが可能である。⑵ ミッション解析機能 打上げ後のHTVは、データ中継衛星TDRSを経由してHTVOCSから運用される。従って、HTVとTDRSが通信可能な時間帯を予測し、TDRSの利用計画を立てることが重要となる。ミッション解析機能は、静止軌道上に配置されている複数のデータ中継衛星に対してHTVの飛行経路から通信可能な時間帯を予測するTDRS可視解析機能を有する。 また、ミッション解析機能は、HTVが搭載しているセンサの太陽干渉や日照日陰が発生する時期を予測する等の計画立案に必要な解析機能を有する。⑶ 運用計画機能 HTVの運用計画は、飛行経路、センサの太陽干渉、日照日陰、消費電力、消費推薬量などの制約を考慮し、それぞれの制約が成立するように立案し、タイムラインを作成する必要がある。運用計画機能は、軌道計画機能とミッション解析機能の結果から運用計画の手順を立案し、立案した手順に沿って電力や消費推薬のリソース計算を行う機能を有する。制約が満足しない場合は制約が満足するまで計画の見直しを繰り返すことにより、最終的な運用手順を求める。図3 近傍ランデブ軌道計画画面図4 運用計画立案画面11小特集画通りに飛行している状況を瞬時に把握できる。 また、現在の位置情報から予測する未来の軌道や、その軌道の予測誤差範囲と、ISSに対する安全確保領域を重ねて表示することにより、HTVが異常発生時にISSへ衝突することなく安全に飛行していることを視覚的に確認することが可能である。⑵ マヌーバ評価画面 HTVはISSに接近するために推進スラスタを使って軌 航法誘導支援機能の提供する代表的な機能を以下に示す。⑴ 飛行プロファイル表示画面 図6はHTVのフライトフェーズ全般で使用されるメイン画面である。ISSを原点としたHTVの相対位置を表示しており、計画軌道の飛行経路に重ね合わせて、HTVとISSが搭載したGPS受信機のテレメトリを基にした現在の位置情報を時々刻々とプロットしていく。HTVが計ARO Laptop再突入飛行安全監視装置(HTV ROE)JEM運用管制システム(JEMOCS)NASA Mission Control Center Houston(MCC-H)CCSDS処理装置PTP装置@SSIPCPTP装置@JSC射場GSEISS Link TLM(HTV/ISS/PROX)ISS Link TLM(HTV/ISS/PROX)GSE Link TLM(HTV)ISS Link TLM(HTV/ISS/PROX)ISS Link CMD(HTV/PROX)ISS Link CMD<EIS Direct Link>(HTV/PROX)ISS Link CMD<JEMOCS Link>(HTV/PROX)ISS Link CMD(HTV/PROX)ISS Link TLM(HTV/ISS/PROX)ISS LinkTLM/CMD(HTV)ISS Link CMD(HTV/PROX)TDRS Link TLM(HTV)TDRS Link TLM(HTV)Sendback TLM・TDRS Link(HTV)Sendback TLM・TDRS Link(HTV)Sendback TLM・ISS Link(HTV/ISS/PROX)TDRS Link TLM/CMD(HTV)TDRS LinkTLM/CMD(HTV)TDRS Link CMD(HTV)TDRS Link CMD(HTV)HTVHTVISSTDRSWSCテレメトリ機能/コマンド機能航法誘導支援機能データ管理機能飛行管制サーバモニタ端末……コマンド端末模擬画像端末(3D)GC端末飛行管制端末CMD TLM 航法誘導データTLM(HTV/ISS/PROX)計画軌道データ計画軌道データ飛行管制サブシステムTLM/CMD(訓練時)HTV運用管制システム(HTVOCS)訓練試験支援サブシステム飛行計画サブシステム図5 飛行管制サブシステム機能構成MSS技報・Vol.21 12道制御を行う。軌道制御に必要となる速度制御量は、HTVの搭載系ソフトウェアが自律的に算出する。航法誘導支援機能は、HTVが算出した速度制御量の妥当性を評価して運用管制要員による軌道制御の実行許可判断を支援するためのマヌーバ計画評価画面(図7<右>)、軌道制御中のスラスタ噴射状況や増速度・加速度の変化をモニタするためのマヌーバ監視画面(図7<左下>)、軌道制御中のHTV姿勢をモニタするためのマヌーバ時姿勢監視画面(図7<左上>)、及びマヌーバ終了後に軌道制御の実測値と計画値を比較評価するためのマヌーバ結果評価画面を持つ。⑶ ISSステートベクトル更新支援画面 HTV搭載ソフトウェアは目標とするISSとの相対位置を計算するためにISSの位置・速度情報を定期的に更新する必要があり、運用管制要員はテレメトリ等に基づき定期的にISS位置・速度情報を作成し、コマンドを送信しなければならない。 図8のISSステートベクトル更新支援画面はISS位置・速度情報を通知するコマンドを自動生成するための画面である。PROXよりダウンリンクされるPROXのGPS航法値、ISSよりダウンリンクされるISSのGPS航法値、及びNASAより提供されるISS軌道情報を源泉データとすることができる。 この機能を用いて、運用管制要員は即時に目標となるISSの位置・速度情報を作成しコマンド送信を行うことが可能である。⑷ ランデブセンサモニタ画面 位置や姿勢の数値情報だけではISSとHTVの相対的な図6 飛行プロファイル表示画面図7 マヌーバ評価画面図8 ISSステートベクトル更新支援画面13小特集⑸ 近傍模擬画像表示画面 HTVがISSにさらに接近すると、ISS構造物にHTVが接触しないように監視する必要がある。図10の近傍模擬画像表示画面はISSやHTVの形状を3次元で表示し、相対位置や相対姿勢だけでなく、ISSのロボットアーム(以下、SSRMSという)の駆動及びHTVの捕獲状態も最新情報を基に更新する機能を有する。3.3 訓練・試験支援サブシステムの技術 訓練・試験支援サブシステム(以下、訓練SSという)は、HTVの運用管制要員を訓練するためのサブシステムである。訓練SSはHTV及びISSの飛行模擬やPROX模擬、地上系インタフェースの模擬等、訓練に必要となるシミュレーションを行っている。 HTV運用では、通常の国内運用だけでなく、NASA地上管制要員及びISSクルーとの協調運用を行うという特徴がある。このため訓練SSは、国内運用訓練用の通常のシミュレーション機能に加え、日米合同訓練における協調訓練を行うための分散シミュレーション(DIst-ributedSimulation:以下、DISという)機能を有している。 本節では、訓練SSが持つシミュレーションモードの種類と違いを説明し、通常のシミュレーション機能と分散シミュレーション機能の技術について説明する。⑴ シミュレーションモードの違い 訓練SSは、表1に示すように①訓練シナリオ確認用のDry runモード、②国内訓練向けのTrainingモード、③NASAとの日米合同訓練向けのDISモードの3つのモードを有する。 Dry runモードは他系とのインタフェースは持たず訓練SS内で閉じるが、Trainingモードの場合は国内訓練で使われるため管制SSとのインタフェースを持つ。一方DISモードの場合、管制SSに加えてNASA訓練システムのサーバがインタフェース対象となり、シミュレーションデータを相互に送受信して1つのシミュレーションを行う分散シミュレーションの形態をとる(図11参照)。幾何学関係を把握しにくい。HTVが万が一安全に飛行できない状態になった場合、速やかに安全確保のための運用手順に切り替えることが必要になるが、数値情報だけでは運用管制要員の判断に遅れが生じる。図9のランデブセンサモニタ画面は、ISS下方からHTVが上昇接近するフェーズにおいてISSとHTVの姿勢、ISSとHTVの現在、過去、未来の相対位置、接近コリドー、キャプチャボックスといった運用の継続判断に必要となる各種領域を重ね合わせて表示した画面である。本画面によってHTVが安全にISSに接近しているか否かを運用管制要員は直観的に確認することができる。図10 近傍模擬画像表示画面No モード用途インタフェース対象シミュレーション形態① Dry run シナリオ確認なし単独シミュレーション② Training 国内訓練飛行管制サブシステム単独シミュレーション③ DIS 日米合同訓練NASA訓練システム飛行管制サブシステム分散シミュレーション表1 シミュレーションモードアメリカ訓練SSISS地上管制装置NASA訓練システム日本ロボットアーム飛行管制SS 操作端末③②、③①図11 訓練・試験支援サブシステムの インタフェース対象図9 ランデブセンサモニタ画面MSS技報・Vol.21 14 上記以外の即応性や複雑度が低いテレメトリや環境については、特に係留中に監視するようなISSテレメトリや熱・温度、圧力系テレメトリについてモデルを簡略化しており、運用訓練担当者によって訓練内容に応じた一定値出力、線形変化、オフセット付加等の設定が可能な簡易模擬機能を有している。 訓練SSのシミュレータでは、ISSの軌道や姿勢等は簡易的なシミュレーションを行っている。国内訓練はISSクルーやNASA地上管制要員との協調運用を想定した訓練ではないため簡易レベルの模擬で十分だが、一方、NASAとの協調訓練や協調運用手順の検証を行う場合にはISS及びSSRMSの詳細シミュレーションが不可欠であり、訓練SSのシミュレータだけではHTV運用管制要員とNASA地上管制要員・ISSクルーの協調運用訓練や手順検証を十分に行うことができない。この問題を解決するため、HTVOCSでは分散シミュレーション技術を採用している。⑶ 分散シミュレーション機能の概要 分散シミュレーション(DIS)とは、複数のシミュレータを結合し1つのシミュレーション環境を構築する技術である。HTVOCSでは、JAXAの所有する訓練SSの高精度なHTVシミュレータと、NASAの所有する高精度なISSシミュレータを結合し、1つのシミュレーション環境を構築している。 DIS時のシミュレーションの範囲は、閉ループでシミュレーションを行っている単独シミュレーションに対し、ISSに関する軌道・姿勢計算とSSRMSの動きに関するデータは、毎秒NASA側から送信されてくるシミュレーション結果をHTVシミュレータへ取り込むという違⑵ 単独シミュレーション機能の概要 単独シミュレーションは、HTV運用管制要員に対する国内運用訓練を実施するTrainingモードで機能するシミュレーション形態である。 単独シミュレーション時のシミュレーション範囲を図12に示す。主な模擬機能は以下のとおりである。⒜ 軌道系模擬・HTV軌道・姿勢、搭載ソフトウェア処理・ISS軌道・姿勢(簡易)・GPS及びTDRS航法値・宇宙環境(重力、大気抵抗等)⒝ 地上系通信環境模擬・外部装置模擬・外部リンクコマンド・テレメトリフォーマット変更処理・通信開始終了情報に基づくインタフェース送受信処理・遅延模擬処理・訓練時刻制御処理 また、シミュレーション機能で使用しているモデルの特徴は以下のとおりである。⒜ ランデブ飛行模擬の特徴 ランデブ飛行を制御するHTV本機のHTV搭載ソフトウェアを組み込んでおり、模擬される航法・誘導・制御は実際に飛行するものと同じである。⒝ ハードウェア系、軌道上宇宙環境模擬の特徴 訓練要件に対応した数学モデルを組み込んでいる。⒞ その他のテレメトリ、環境模擬の特徴ISSNASAHTVOCSTDRSHTVCMD端末JEMOCSPROXISS通信データ処理装置SSRMS外部I/FサーバCCSDS処理装置処理装置GPS地上通信系模擬・伝送遅延・データフォーマット軌道系模擬・HTV軌道、姿勢、搭載SW出力、他・ISS軌道、姿勢、近傍通信、他・GPS航法値・TDRS通信、宇宙環境、、他端末TLM端末飛行管制SSWSC外部装置模擬図12 単独シミュレーション時の模擬範囲15小特集ち、フェデレートから出力することを公開、入力を購読という。 訓練SSでは、HTV・PROXデータを公開してISSフェデレートへ出力し、ISS・SSRMS、通信遮蔽データを購読してシミュレーションに反映している。 RTIではサーバにて時刻の進行を管理し、サーバに登録されている全てのフェデレートからの時刻進行要求がそろったら、次のサイクルへ進む許可を送信する。RTI下でのHTVフェデレートの1秒あたりのシミュレーション進行シーケンスは、主に以下の順である。 ①1秒分のシミュレーション計算 ②公開データ送信 ( UAV:Update Attribute Values) ③時刻進行要求送信 ( TAR:Time Advance Request) ④時刻進行許可受信 ( TAG:Time Advance Grant) ⑤購読データ受信 ( RAV:Reflect Attribute Values) 図14に示すように、各フェデレートの時刻進行要求はシミュレーション計算が終了した後に要求し、時刻進行許可を受信するまで待ち状態となる。ここでサーバから時刻進行許可を受信すると、次のサイクルのシミュレーションを計算することが可能となる。したがって、どちらかのフェデレートが時間管理を行えば、実時間でのシミュレーションや一時停止等の時間管理が可能となる。HTV・ISSのフェデレーションではISSフェデレートが実時間管理を行っている。いがある。NASAのISSシミュレータにおいても同様に、毎秒JAXA側から送信するHTVやPROXのシミュレーション結果を取り込んで逐次その後のシミュレーションに反映する。 こうすることにより、HTVとISSが同じ仮想空間を飛行しているように見えるため、NASA・JAXA合同で行う訓練をより現実に近いシミュレーション状況下で行うことができる。 以前の協調訓練では、どちらか一方のサイトに集合して訓練したり、それぞれのシミュレータを単独で実行させ、あたかも同じ状況であると想定しながら訓練していた。これに対しDISを導入したことで、それぞれの場所の実際に運用に使用する端末で、同一時間に同一条件下でのシミュレーションを実現し、より現実的な訓練を行うことが可能となった。 訓練システムへDISを適用した大きなメリットとしては以下の点が挙げられる。・地理的に離れた2つの運用施設のNASA・JAXA運用管制要員、及びISSクルーに対する高度な訓練が可能であり、日米合同訓練のための海外出張に係るコスト低減および運用者の負担軽減・現実に近い環境下における、HTVの自律的な衝突回避等の安全対策機能の挙動の把握が可能・統合運用時の運用手順書の事前検証が可能⑷ DISの技術 シミュレータを結合する部分の共通基盤として、High Level Architecture(以下、HLAという)に準拠したソフトウェアRun Time Infrastructure(以下、RTIという)を使用し、DISを実現している。HLAは2000年9月に国際的な標準規格であるIEEEとして標準化された技術である。HLAでは、各シミュレータ単位をフェデレート(federate)と呼び、シミュレーション全体をフェデレーションと呼ぶ(図13参照)。また、RTIではオブジェクトモデルの定義が重要となり、フェデレートが入出力するデータの詳細を定義する。この入出力のう0ISSfederateUAV(t=1のデータ) (t=2のデータ) (t=3のデータ)↓HTVfederate0UAV↓↑TAR(t=1への)SimRTIserver0111222Sim↑TAGSimUAV↓↑RAV(t=1のデータ)↑TAG↑RAV(t=2のデータ)↑RAV(t=3のデータ)↑TAR(t=2への)↑TAR(t=3への)UAV(Update Attribute Values)Simulation計算RAV(Reflect Attribute Values)TAR(Time Advance Request)TAG(Time Advance Grant)図14 データの出力・反映タイミングの概念図HTVFederateISSFederateRTIHTV/PROXデータISS/SSRMS/遮蔽データHTV/PROXデータISS/SSRMS/遮蔽データ図13 フェデレーション構成MSS技報・Vol.21 16 HTVの協調訓練では、飛行からキャプチャポイントへの停止、ISSクルーによるSSRMSを使用したキャプチャ、係留までの一連の訓練を行う。しかし、先述のとおり訓練SSのHTVフェデレートはISSに関する模擬が簡易的であるため、SSRMSの詳細な挙動とキャプチャからのHTVの幾何学的な動きは一切模擬されていない。したがって、キャプチャからの一連の処理では、HTVフェデレートはHTVの位置・速度・姿勢データの更新権限をNASAのISSフェデレートへ移譲し、ISSフェデレートで更新されたHTVデータを購読している。この移譲する方法のことをOwnership Transferといい、HTVが姿勢・位置制御を停止してキャプチャされるためのフリードリフト状態になったタイミングで権限を移譲する仕組みになっている。また、逆にフリードリフト状態から離脱やISSとの衝突回避のために姿勢・位置制御を再開した場合には、HTVフェデレートがHTVデータの更新権限をISSフェデレートから取得し、HTVフェデレートが計算した航法値でデータが更新されるようになる。このOwnership Transferにより、HTVの位置・速度・姿勢は、SSRMSに把持されている間の幾何学的な変化にも対応可能となっており、キャプチャ時だけでなくリリース・離脱時の訓練にも対応可能となっている。こうすることで、一連の連続した詳細なシミュレーションを実現し、HTVの協調訓練を行うことを可能としているのである。4.むすび HTVOCSの特徴的な機能や技術について述べた。 HTV技術実証機での運用実績によりHTVOCSがその役目を十分果たし、国際協力に大きく貢献したことが示された。 HTVは今後、年に1機のペースで2015年までの打ち上げが計画されており、ISSの運用期間が延長されればそれに伴って更に打ち上げが追加される可能性がある。HTVOCSはそれらのHTVの運用を確実に支えていく必要がある。 現在、HTVOCSは、HTVの次号機の運用に向けて更なる改良を重ね、試験や運用訓練に供されている。我々は、HTVOCSの維持開発を着実に遂行して、より使いやすく確実で安定したものにしていくとともに、HTVOCSの維持開発を通じて運用管制システム開発の技術の蓄積を図っていく。