2023年度 三菱電機ソフトウエア技術レポート
(コラム)
仮想走行環境の開発
逆走や急ブレーキにも対応
自動運転のための安全検証に必要な
車両走行ログをパソコンで作成
衝突を避ける自動ブレーキ
新型車には搭載義務化
自動車を運転しているとき、事故になりそうでヒヤリとした経験がある人は多いはずです。このような状況で衝突を避ける自動ブレーキは、昔の車には付いていませんでした。しかし、事故に関する自動ブレーキの統計的優位性から、2021年11月より、国内で販売する新型車を対象に自動ブレーキの搭載義務化が始まりました。2025年12月以降は、国内で販売する既存の車種も自動ブレーキ搭載義務化の対象になります。
自動ブレーキは、レーダーやカメラにより前方を監視します。前方の自動車や歩行者を検知し、衝突の危険性が高まった場合、最初は音や警告灯などで警告し、運転手にブレーキ操作を促します。それでも運転手にブレーキ操作がなく、このままでは衝突の可能性が高いとシステムが判断したとき、システムが自動的にブレーキを作動し、被害軽減を図ります。
センサーが検知できない隠れた危険
先進運転支援に必要な車の通信
新型車への搭載が義務化されている自動ブレーキですが、車に搭載したレーダーやカメラだけでは衝突検知として十分ではありません。レーダーやカメラの誤作動は考慮外としても、レーダーやカメラの届かないところにも危険は隠れています。
例えば、高速道路において、数両先の車両が急ブレーキを掛けて発生する玉突き事故。数両先の車両はレーダーやカメラの届かない所にいます。この玉突き事故を防ぐには、急ブレーキをかけた車両から後続の車両に急ブレーキ情報を通信し、停止や減速を促すことが有効です。
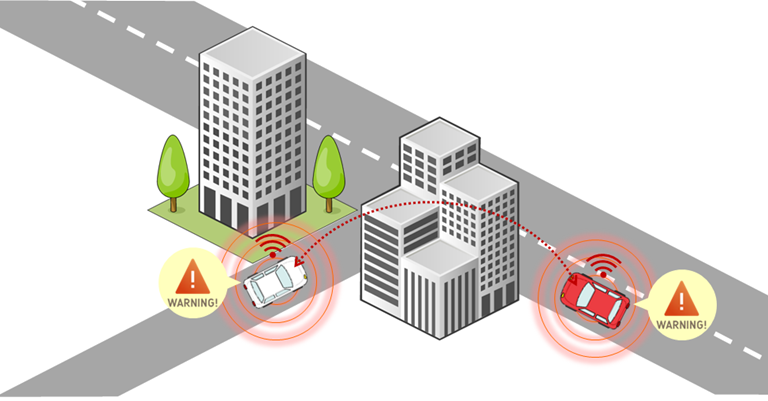
また、交差点で右折をしようとした場合、通過する大きなトラックの死角に対向の軽車両が入っている時、レーダーやカメラは軽車両を認識できません。車両が自らの位置や速度の情報を周りの車両に通信することは、死角の多い交差点の安全な通過や右折に有効です。(図1)
先進運転支援は通信で安全運転を目指しています。逆走検知では、他車両からの位置や速度を受信することで、対向車か逆走車かを判定し、逆走車の場合、事前の車線変更等により衝突回避を行うことができます。
先進運転支援が、正しく衝突検知や衝突回避ができるかを検証するために、三菱電機では、当初、実際に車両を走らせて走行ログを取得していました。走行ログとは、車両の位置に関する情報(緯度、経度、高度)と、速度、加速度、車両の方位、ウィンカー(方向指示器)の使用の有無の情報です。しかし、実車での走行ログ取得は、手間と時間がかかります。「交通流シミュレータSUMO※(スーモ)を用いて、机上で走行ログが取れないか」とMESW三田事業所に三菱電機から依頼が入りました。
※SUMO : Simulation of Urban MObility
ドイツで開発された交通流シミュレータSUMOをベースに
高精度地図を変換
交通流シミュレータSUMOは、ドイツ航空宇宙センターが開発したオープンソースソフトウェアで、都市における実際の交通量の予測と最適化に利用されています。SUMO選定のポイントとして、過去開発で使用実績があり、自動運転の評価目的で使用しようとするドイツの企業の存在もあったといいます。
「SUMOを使うと比較的簡単に仮想車両を走らせ、走行ログを取ることができました。しかし、実際の走行ログと比べると、車線数情報も不足しており地図精度が足りません。そこで、三菱電機が高精度ロケータで使用している高精度地図をSUMO地図に変換することにしました。オープンソースソフトウェアはライセンス上、誰でも使うことができるソフトウェアですが、SUMOは高精度地図を使用する前提で作成されているものではないため、高精度地図をSUMO地図に変換するのに、試行錯誤を繰り返しました。3ヶ月ほどで高精度地図の変換も終え、求める精度の走行データを得ることができました」(樫原氏)
衝突検知のためには違法走行も
実車では取得困難な走行データも生成
「SUMOの一般的な使用方法では、事前に設定したルール通りにしか走行できません。加減速の変化量も固定で、交差点が赤信号で停車する場合、固定の減速量に応じて停車し、青信号で発車する時は固定の増速量で、最大速度まで加速するというルールに従った動作しかできませんでした」(樫原氏)
そこで、樫原氏は、衝突検知に必要な走行とSUMOで得られる走行のギャップを整理し、さらに3ヶ月かけて外部制御で仮想車両の車速変更、車線変更等を行えるようにしました。この結果、急ブレーキや車線変更も可能となりました。急ブレーキは玉突き事故の再現に、車線変更は逆走による衝突事故の再現に利用できます。この急ブレーキや逆走の走行ログは実車では危険走行や違法走行となり、取得することができません。仮想走行環境は、実道路で車両が急ブレーキを掛けたり、逆走したりしているような状況を実現することができました。仮想走行環境は衝突検知で必要な、取得困難な走行ログが作成できることで、三菱電機から高い評価を得ました。
MESWの技術や成果の積み重ねが
10年先の自動運転を実現
先進運転支援の車両の衝突検知および衝突回避の検証のための走行ログを机上で生成する仮想走行環境。オープンソースの交通流シミュレータをベースに高精度地図を用いて精度を向上。さらに、仮想車両を外部制御できるようにすることで危険走行、違法走行を実現。実環境では取得できない走行ログを、わずか6ヶ月で取得できるようになりました。
先進運転支援による自動運転は、総務省を中心に検討が進められ、2040年頃の実現に向け、2030年頃に新たな車両通信方式の導入が必要とされています。
「車が自動運転できる世界って本当に来るの?と思っている人は多いと思います。これから10年以上かかると思いますが、将来、車が自動運転になる日が必ずやってきます。それまで、MESWで開発している技術や成果が積み重なって自動運転に繋がっていくのだと思うと仕事にやりがいを感じます」(樫原氏)
先進運転支援は、安全運転はもちろん、信号機で止まらないようなルート探索などで、渋滞が解消された快適な移動体験も期待されています。MESWが拓く10年後の未来。考えるだけでワクワクしてきませんか。