2022年度 三菱電機ソフトウエア技術レポート
宇宙ステーション補給機9機を支えた管制設備に関わる技術
1. はじめに

図 1. HTV運用管制室
2009年9月11日に打ち上げられた宇宙ステーション補給機(H-II Transfer Vehicle:以下、HTVという)技術実証機は、その後9月18日に日本で初めて国際宇宙ステーション(International Space Station:以下、ISSという)とのランデブ及びキャプチャに成功した。HTVは、2020年のHTV9号機まで連続9回の物資輸送ミッションを達成している。本HTVのミッションを達成するための地上運用管制システム(HTV Operations Control System:以下、HTVOCSという)の開発は、1998年から開始され、三菱電機ソフトウエア株式会社は国立研究開発法人宇宙航空研究開発機構(JAXA)殿、及び三菱電機株式会社(MELCO)殿のご指導のもと、2020年までの22年間に亘り、HTVOCSの設計、製造、試験及び計算機換装、機能改修・新規ミッションに伴う機能付加、維持管理の全工程に携わってきた。本稿では、10年を超えるHTVのミッションを支えた管制設備に関わる技術/成果を紹介する。
2. HTVOCSの概要
2.1 HTVOCS構成
HTVOCSは筑波宇宙センター内に整備されたHTV運用システムの一部であり、HTVの飛行運用計画立案、テレメトリ・コマンド運用、データ管理及び管制要員訓練を行う機能を提供するシステムである。HTVOCSは、ISSとのランデブを行うため、以下に示す特徴を持つ。
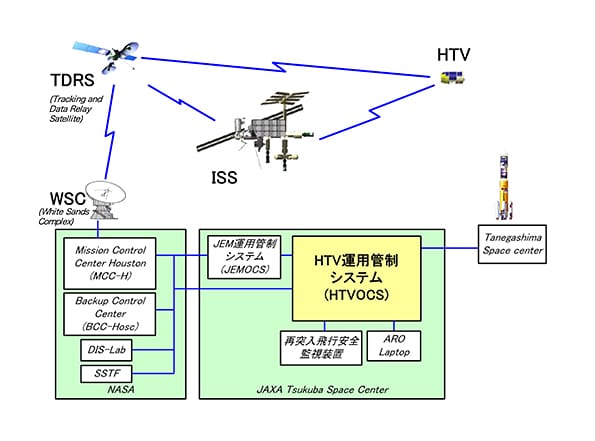
図 2. HTVOCS構成
- (1)アメリカ航空宇宙局(NASA)所有のデータ中継衛星を用いたHTVの単独飛行運用と、ISS近傍域や係留中におけるNASAとの協調運用の両方を達成する。
- (2)ランデブ飛行中の逐次変化していくHTVとISS両方の現在の状態と予測状態を同一の画面に表示する機能を持ち、タイムリーな判断と迅速な対応ができる手段を運用者に提供する。
- (3)NASAが保有するISSシミュレータと協調シミュレーションを行う機能を持ち、実機相当でのNASAとの運用訓練や手順書検証を実現する。
以後HTVOCSの構成(図2参照)と、HTVOCSが保有する3つのサブシステム機能概要を示す。
2.2 飛行計画サブシステム
飛行計画サブシステム(以下、計画SSという)はHTVの飛行計画を立案し、運用手順書の作成を行うサブシステムである。
計画SSの特徴は、従来の地上運用管制設備において複数のサブシステムに分散されている機能が単一のサブシステムにまとまっている点である。この利点は、運用者がHTVの軌道計画の立案から運用手順書の作成までをシームレスに行えることである。計画立案処理の作業の流れとデータ入出力の概要を図3に示す。
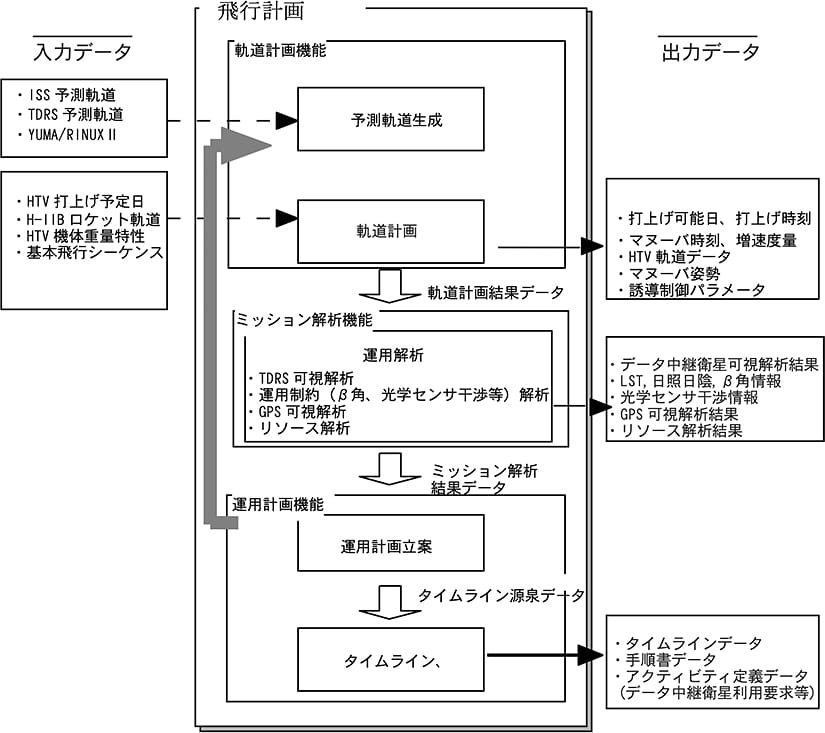
図 3. 計画立案処理の作業の流れとデータ入出力
計画SSの主要機能について以下に示す。
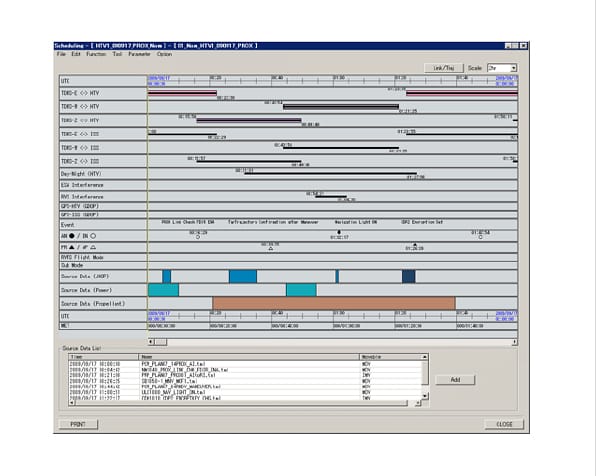
図 4. 運用計画立案画面
- (1)軌道計画機能
軌道計画機能はNASAから入手した最新のISS軌道情報を基に、HTVの飛行する軌道を計画する機能である。
H-IIBロケット試験機打ち上げ日、ISS軌道情報及びHTV投入軌道要素を基に、ISSとランデブすることができる、H-IIBロケットの打上時刻の計算を行い、ロケット分離からISSへの接近開始点までのHTVの軌道計画を生成する機能がある。
また、ISS軌道情報及びISSへの接近開始時刻を基に、HTV搭載ソフトウェアのロジックと同じ飛行シーケンスにて、ISSがHTVをキャプチャするポイントまでの軌道計画を立案する機能がある。
コンティンジェンシー発生時にはHTVがISSへの衝突を回避した後、再度復帰する軌道計画も立案することが可能である。
- (2)ミッション解析機能
計画SSは従来の地上運用管制設備にある日照日陰解析や光学センサ干渉解析といったミッション解析機能の他に、TDRS可視解析機能を持っている。
- (3)運用計画機能
運用計画機能は、HTVの飛行経路とミッション解析結果からHTV運用タイムラインと手順書を作成する機能である。本機能は、運用の目的別に細分化された手順からHTVの飛行経路に対して最適な運用シーケンスとなるように運用手順の配置を自動的に行うことが可能である。運用制約を基に、制約伝播を行い、制約条件が成立するような運用シーケンスを導き出している。制約伝播のロジックは、ILOG社(2009年からIBM社に統合)製のソフトウェアを組み込み実現している。
また、HTVの軌道、マヌーバ計画、TDRS予約源泉情報の作成等NASAの管制システムへインタフェースするデータの作成機能も有している。
2.3 飛行管制サブシステム
HTVOCSの飛行管制サブシステム(以下、管制SSという)の従来衛星の管制装置と大きく異なる点は、HTVのみならず、ISSや、ISSに設置される近傍域通信装置(以下、PROXという)のテレメトリをNASAの地上設備を経由して受信し、これらを統合的に処理することが可能な点である。
また、従来の管制システムに実装されるようなテレメトリ・コマンド機能、データ管理機能に加えて、HTVのランデブ運用を支援するための航法誘導支援機能を有する点である。航法誘導支援機能の提供する代表的な機能を以下に示す。
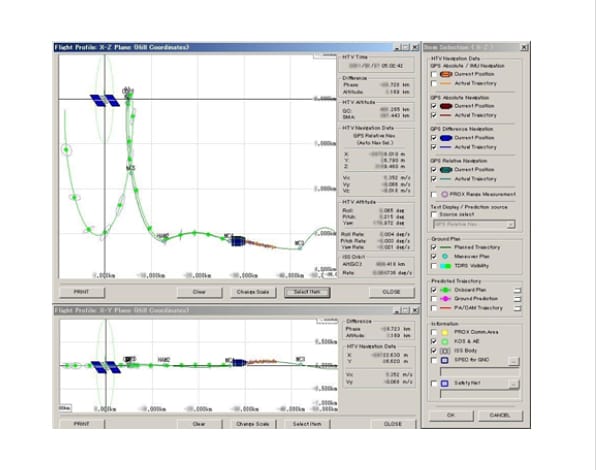
図 5. 飛行プロファイル表示画面
- (1)飛行プロファイル表示画面
HTV飛行プロファイルとしてGPS絶対航法値、GPS差分航法値及びGPS相対航法値といった各種航法値を、ISSを原点、ISSの進行方向を-X方向、地心方向を+Z方向としたHILL座標系と呼ばれる座標系に変換・プロットし、ISSからのHTVの相対位置を運用者が容易に把握できる(図5参照)。
計画SSにおいて立案された地上軌道計画、各種航法値テレメトリから算出されたHTVの現在位置や過去の軌跡、ISS周りの安全確保領域、及び予測軌道等をオーバーレイ表示することにより、HTVが計画どおりISSクルーの安全性を確保して飛行しているかを確認することが可能である。
予測軌道については、HILL座標系上で伝播して算出することも、慣性座標系におけるHTVとISSの航法値をそれぞれ伝播して算出した後にHILL座標系に変換して表示することも可能である。
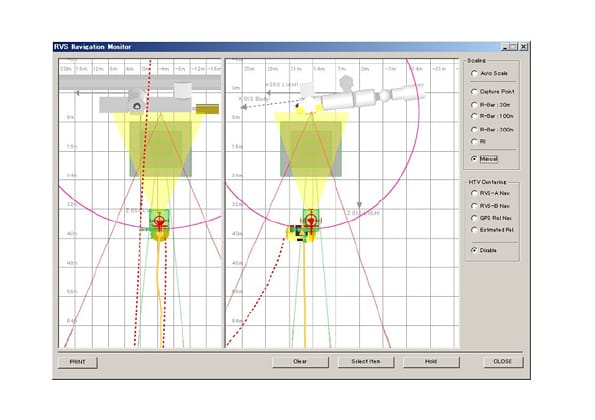
図6 ランデブセンサモニタ画面
図 6. ランデブセンサモニタ画面
- (2)ランデブセンサモニタ画面
ISS下方からHTVが上昇接近するフェーズにおいて、ISS姿勢、接近コリドー、キャプチャボックス(ISSの下方に設定された、HTVがキャプチャされるために相対停止する仮想的な領域)、ISSからのHTVの相対位置及び姿勢、ランデブセンサのヘッダ位置及び視野、HTVの把持部分の位置情報、予測軌道等をオーバーレイ表示する画面である(図6参照)。
本画面で表示している情報の源泉となるデータを統一した座標系に変換した上でオーバーレイ表示することにより、HTVが安全にISSに接近しているかと異常兆候を運用者は迅速に確認することができる。
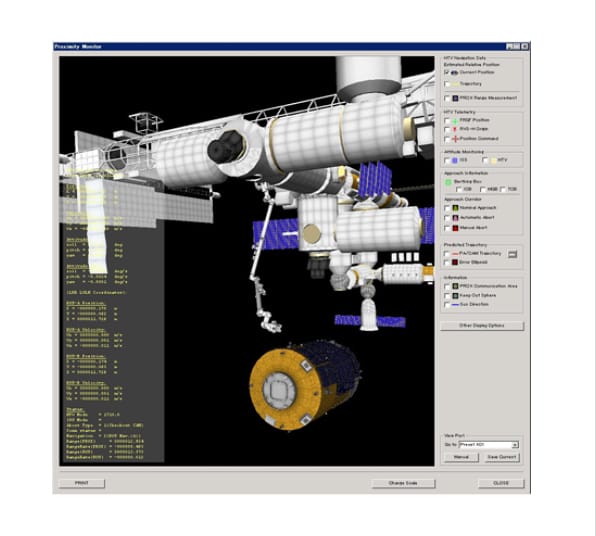
図 7. 近傍模擬画像表示画面
- (3)近傍模擬画像表示画面
ISS下方からHTVが上昇接近するフェーズにおける接近コリドー、キャプチャボックス、ISSからのHTVの相対位置及び姿勢、ランデブセンサのヘッダ位置、HTVの把持部分の位置、予測軌道等を、3次元で立体的にモニタすることができる画面である(図7参照)。
2.4 訓練・試験支援サブシステム
訓練・試験支援サブシステム(以下、訓練SSという)は、HTVの運用管制を行う運用要員を訓練するためのサブシステムである。訓練SSはHTV及びISSの飛行模擬やPROX模擬、地上系インタフェースの模擬等、訓練に必要となるシミュレーションを行っている。
HTV運用では通常の国内運用だけでなく、NASA地上管制要員とISSクルーとの協調運用を行うという特徴がある。このため訓練SSとして、国内運用訓練用の通常のシミュレーション機能だけでなく、分散シミュレーション(DIstributed Simulation:以下、DISという)機能を有している。DISではNASAの訓練システムとシミュレーションデータを送受信して1つのシミュレーションを行う形態をとることができる。
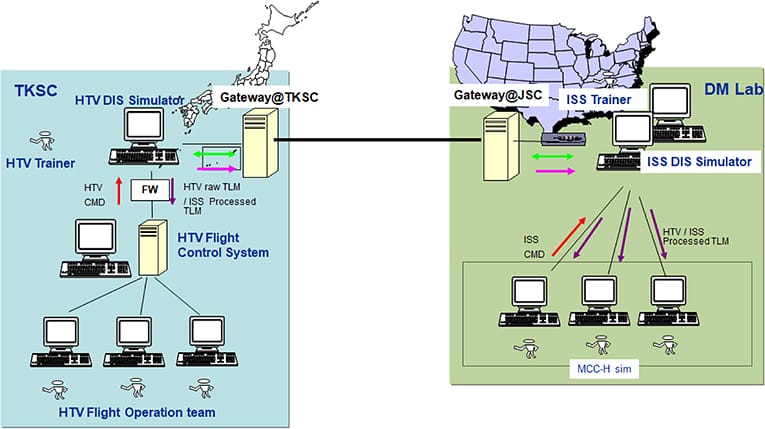
図 8. DIS構成
- (1)シミュレーション機能
訓練SSは、HTVの運用訓練を国内のみでも実施可能にする単独シミュレーションとして機能する。
単独シミュレーション時の模擬範囲の特徴を以下に示す。- (a)HTV搭載ソフトウェアと同一のものを取り込んでおり、模擬される航法は実際に飛行するものと同等。
- (b)ISS、TDRS模擬機能を持ち、軌道の模擬とともに、ISSについては簡易なテレメトリ模擬を保有している。
- (c)HTVOCSとの外部IFシステム模擬機能を持ち、HTVOCSを使用する運用者の訓練時に、実際のオペレーションと同等の手順を必要とするようにした。
- (d)運用者が目にする時刻は、シミュレータで模擬し配信している。訓練で使用する未来、過去の時刻はHTVOCS利用者の画面上で統一され訓練全体の模擬度向上を図っている。
なお、ISS及びSSRMS(Space Station Remote Manipulator System)の詳細シミュレーションは、搭載ソフトウェアも詳細設計内容も入手できないため模擬度が低く、NASA地上管制要員とISSクルーのための訓練・手順書検証に使用できないという課題があった。本課題をHTVOCSでは分散シミュレーション技術(DIS)で解決している。
- (2)分散シミュレーション機能
DISとは、複数のシミュレータを結合し1つのシミュレーション環境を構築する技術である。HTVOCSの場合には、JAXAの所有する高精度なHTVシミュレータと、NASAの所有する高精度なISSシミュレータを結合し、1つのシミュレーション環境を構築している。シミュレータを結合する部分を共通基盤として、HLA(High Level Architecture)に準拠したソフトウェアRTI(Run Time Infrastructure)を使用し、DISを実現している。HLAは2000年9月に国際的な標準規格であるIEEEとして標準化された技術である。HLAでは、各シミュレータ単位をフェデレート(federate)と呼び、シミュレーション全体をフェデレーションと呼ぶ。また、RTIではオブジェクトモデルの定義が重要となり、フェデレートが入出力するデータの詳細を定義する。この入出力のうち、フェデレートから出力することを公開、入力を購読という。
訓練SSでは、HTV・PROXデータを公開してISSフェデレートへ出力し、ISS・SSRMS、通信遮蔽データを購読してシミュレーションに反映している。
RTIは、上述したデータの購読、処理をサーバにて時刻の進行管理を行い、サーバに登録されている全てのフェデレートからの時刻進行要求がそろったら、次のサイクルへ進む許可を送信することで管理する。RTI下でのHTVフェデレートの1秒あたりのシミュレーション進行シーケンスを図9に示す。
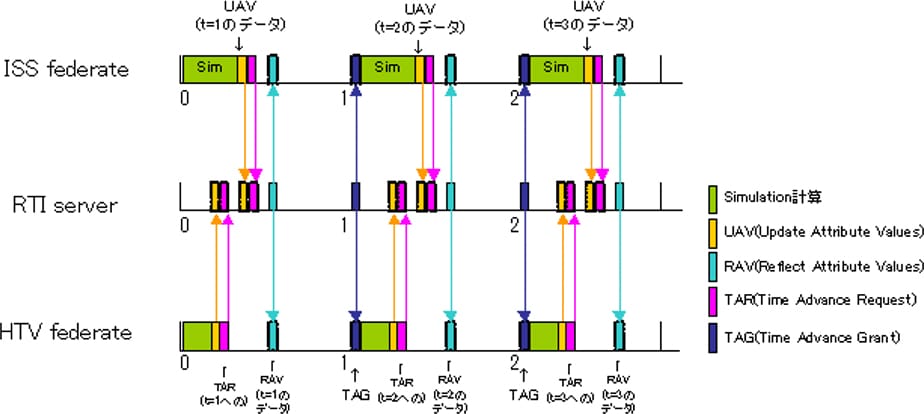
図 9. DISシミュレーションシーケンス
各フェデレートの時刻進行要求はシミュレーション計算が終了した後に要求し、時刻進行許可を受信するまで待ち状態となる。待ち状態でサーバから時刻進行許可を受信すると、次のサイクルのシミュレーションを計算する。本シーケンスを用いて、シミュレーション中に一時停止及び停止中にシミュレーション状況をゲームの途中経過のようにSaveする機能を実現している。
3. HTVOCS開発経緯と運用継続に対する取組
3.1 HTVOCS開発経緯
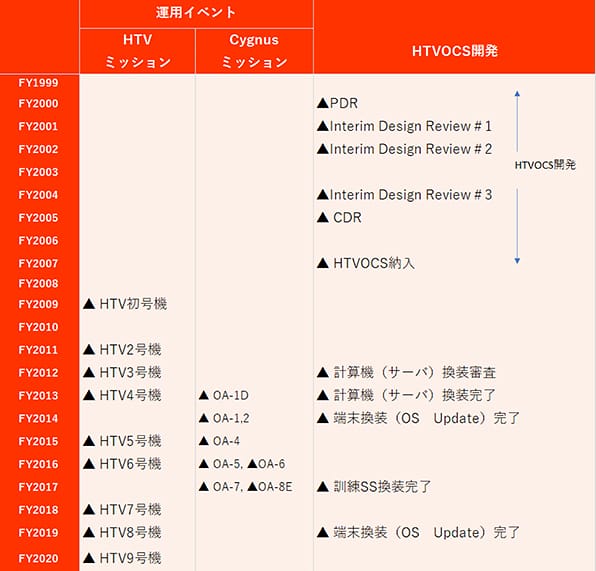
図 10. HTVOCS開発/運用実績
- (1)アメリカ航空宇宙局(NASA)所有のデータ中継衛星を用いたHTVの単独飛行運用と、ISS近傍域や係留中におけるNASAとの協調運用の両方を達成する。
- (2)ランデブ飛行中の逐次変化していくHTVとISS両方の現在の状態と予測状態を同一の画面に表示する機能を持ち、タイムリーな判断と迅速な対応ができる手段を運用者に提供する。
- (3)NASAが保有するISSシミュレータと協調シミュレーションを行う機能を持ち、実機相当でのNASAとの運用訓練や手順書検証を実現する。
当社は、MELCO殿が開発した宇宙機である“実験・観測フリーフライヤ(SFU)”及び軌道上でランデブドッキング技術実証を行った“ETS-VII”における運用管制設備の開発に関与しており、HTVにおいても運用管制システム開発、維持を9号機までの全期間に亘り担当した。初号機にむけた開発から9号機まで及び近傍通信システムを共用したCygnus宇宙機の運用支援を含む約21年間の実績を図10に示す。
図に記載のようにHTVOCSの開発が完了しHTV初号機以後の運用期間中、主要サーバ含む計算機換装は1回、端末についてはOS換装を計2回実施している。また、HTVのミッション及び仕様変更や運用要求に対応した機能改善、追加作業は、毎号機実施してきている。初号機以後11年に亘る運用期間において、換装、機能改善が続く中、開発当初からのシステムアーキテクチャ及びソースコードの大規模な変更は実施せず、運用を継続できている。
3.2 運用継続を支えた技術と当社の取組
宇宙機の運用を10年以上継続してきたHTVOCS開発での技術と当社の取組を示す。
- (1)宇宙機、運用要求に左右されない汎用画面
HTVOCSでは、HTVの航法状態のアニメーションを行う航法誘導画面の他に、宇宙機担当、運用担当がモニタするための機能を保有している。本モニタのための機能として、表示選択できる画面、サイズ、画面に表示できるテレメトリ項目・レイアウト、背景・表示色、簡易的な図の描画や貼り付けを運用者が自由に実施できるように開発している。この汎用画面機能により、運用者、宇宙機担当者自身が効率的なモニタを行える画面を作り、運用まで継続して作成できるようになった。開発当初の2000年初頭では、他衛星における運用システムや開発実績のあるETS-VIIランデブドッキング実験運用システムでは、あらかじめ画面レイアウトや画面枚数を規定すること、図の描画を伴う画面は開発時の作りこみを行うことが必要であった。そのため、運用者が訓練や実運用を経てモニタ機能を修正したい場合、メーカ修正作業が必要になっていた。HTVOCSでは、汎用画面によるモニタ機能により、運用時モニタの自由度が向上したことで、逐次要求による改修なく、10年間の宇宙機、運用の更新、発展に追従できた。
汎用画面機能は、HTVOCSの特徴である航法誘導支援機能と同じくMicrosoft Visual C++を用いて開発を実施している。設計審査が行われた2000年初頭は、計算機能力が低いことからワークステーションをモニタ用の端末計算機として使用することが主流であった。しかし、航法誘導画面及び汎用画面の開発と将来のPC発展性から、HTVOCSでは、端末にWindowsをOSとしたPCを採用し、審査を受けている。本設計、端末の採用が運用期間途中で大きな改修や、ワークステーションから端末変更といった後段での影響を抑える要因の一つである。 - (2)運用者がカスタマイズ可能なツールを使える管制端末機能、インタフェースの追加
HTVOCSでは、前述の汎用画面とともに、運用者がリアルタイムでのテレメトリを用いた変換、計算を行うツールを開発できる環境を提供している。本環境では、運用者が自身で自由なツールを使えるようWindowsの端末と、宇宙機のテレメトリを工学値として取り扱えるライブラリを提供している。ライブラリでは運用要求に基づき、Microsoft Excelでのテレメトリデータ利用を可能としている。この端末機能を追加するにあたり、管制システムの心臓部である管制サーバには機能を付加していない。モニタ端末の接続部に、本テレメトリ配信を行う簡易サーバを接続し、ここからテレメトリを中継して流す仕組みとしている。これは、管制システムの心臓部であるテレメトリサーバに改修をかけないこと、追加となる負荷を与えないこと、端末の更なる追加や運用者ツールによるセキュリティリスクの排除を目的としている。テレメトリデータを用いた簡易計算処理を開発できる環境により、汎用画面機能と同じく、運用、訓練を通じて迅速に必要となる機能の対応により10年間の宇宙機、運用の更新、発展に追従できた。 - (3)外部システム模擬、搭載模擬をフルソフトウェアで実現しているシミュレータ
2章に記載した訓練SSは、訓練を実施するためにHTV、ISS等の宇宙機自体の模擬とともに、HTVOCSがインタフェースを行う相手側のシステム模擬機能を保有している。訓練SSは、宇宙機や相手側システムが、将来にわたって更新されることを前提とし、フルソフトウェアでの模擬を行った。またHTV自体の搭載ソフトウェアでランデブの根本を担うランデブフライトソフトウェアは、試験環境とともに同一のコードを使用している。
このようにフルソフトウェアかつ搭載ソフトウェアをコードとして内包できるシステム化を実現したことで、搭載ソフトウェアが号機ごと又は訓練中の変更においても、大きな作りなおしを不要とした。搭載ソフトウェアと同様に外部システムも機能改修等があるが、都度訓練SSの模擬機能を同じく改修することで実環境と同様な模擬環境を提供できている。さらにH/Wを使わないことで訓練に必要な模擬レベルでの改修で済むことから、コスト、改修期間を短縮できたものと考える。また、搭載ソフトウェアに関しては、複数存在するバージョン単位で入替えを可能とし、最新バージョンで不適合があった場合、一世代前のシミュレーションを実行することもできる。長い運用期間と複数号機の遷移が続く中、フルソフトウェアで搭載ソフトウェアは簡易に入替え可能な仕組みを保有したことで、高度な模擬を迅速に運用・訓練に供することができた。
4. HTVOCS成果と今後の展望
HTVOCSは初号機運用からは11年間運用を支えたシステムである。開発開始からは22年となる。これほどの長期間量産宇宙機運用を行う運用システム全般の開発、維持は当社として初のプロジェクトとなった。本プロジェクトで得た実績、経験、技術は、当社にとって大きな成果であるとともに、次世代、将来の宇宙機、衛星向けシステム開発に適用可能である。現在、ISSへの物資輸送に向け、次世代の宇宙機に対応した運用管制設備を開発中である。HTVOCSの長期に亘る運用において蓄積した知見、技術の活用を実施中である。次世代宇宙機においても、長く、確実に運用を支えるシステムとしての貢献ができることを期待している。
5. むすび
HTVOCSにおける長期間の運用を支えた特徴的な機能や技術について述べた。
HTVOCS自体は2020年HTV9号機の運用完了を持って、退役している。当社はHTVOCSの開発から9号機までの維持、運用に携わることができ、国際協力に大きく貢献できたと言える。
続く次世代宇宙機及び将来の深宇宙機ミッションにも積極的に関与、推進し、日本の宇宙開発及び国際協力に貢献していく。
| 【商標】 |
Microsoft、Windows、Excel、Visual C++は、米国Microsoft Corporationの米国及びその他の国における登録商標又は商標である。 |
|---|---|
| 【参考文献】 |
|